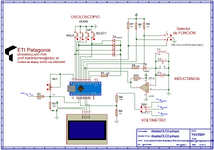
En el siguiente ejemplo, muestro como podemos hacer una herramienta multifunción (Osciloscopio, Voltímetro, Inductometro y Frecuencímetro) con un display OLED I2c...
Cuando inicie este proyecto, me tope con dos problemas. Por un lado la capacidad del Arduino nano, y por otro, la activación y desactivación del registro del ADC (Lectura con referencia interna, externa, default) para no tener conflictos en las distintas funciones...
El programa completo corre perfectamente en un Arduino MEGA, pero para poder hacerlo correr en el Arduino NANO, noten que achique el programa del frecuencímetro (igual están las líneas que obvie para que pueda entrar en el NANO)...

Cuando inicie este proyecto, me tope con dos problemas. Por un lado la capacidad del Arduino nano, y por otro, la activación y desactivación del registro del ADC (Lectura con referencia interna, externa, default) para no tener conflictos en las distintas funciones...
El programa completo corre perfectamente en un Arduino MEGA, pero para poder hacerlo correr en el Arduino NANO, noten que achique el programa del frecuencímetro (igual están las líneas que obvie para que pueda entrar en el NANO)...
CSS:
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
// Frecuencimetro-Inductometro-Voltimetro-Osciloscopio //
// prof.martintorres@educ.ar - ETI Patagonia Argentina //
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <avr/pgmspace.h> // PROGMEM
#include <EEPROM.h>
#define SCREEN_WIDTH 128 // ancho display OLED
#define SCREEN_HEIGHT 64 // alto display OLED
#define REC_LENGTH 200 //
// Declaramos la coneccion I2C de un display OLED SSD1306 (SDA, SCL pines)
#define OLED_RESET -1 // Reset pin #
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
//#include <FreqCount.h>
////////////////////VARIABLES DEL FRECUENCIMETRO////////////////////
unsigned long count = 0;
////////////////////VARIABLES DEL INDUCTOMETRO////////////////////
//13 is the input to the circuit (connects to 150ohm resistor), 11 is the comparator/op-amp output.
double pulse, frequency, capacitance, inductance, inductance_mH;
////////////////////VARIABLES DEL VOLTIMETRO////////////////////
int PinADC = A1;
float voltaje=0.0;
int medida = 0;
int porcent = 0;
int pinOFFset=A2;
float offset=0.0;
int valorPot=0;
float vcc = 4.98; //valor real de la alimentacion de Arduino, Vcc
float r1 = 1000000.0; // 1M
float r2 = 100000.0; // 100K
float input_volt = 0.0;
float temp = 0.0;
////////////////////VARIABLES DEL OSCILOSCOPIO////////////////////
const char vRangeName[10][5] PROGMEM = {"A50V", "A 5V", " 50V", " 20V", " 10V", " 5V", " 2V", " 1V", "0.5V", "0.2V"}; // \0
const char * const vstring_table[] PROGMEM = {vRangeName[0], vRangeName[1], vRangeName[2], vRangeName[3], vRangeName[4], vRangeName[5], vRangeName[6], vRangeName[7], vRangeName[8], vRangeName[9]};
const char hRangeName[8][6] PROGMEM = {" 50ms", " 20ms", " 10ms", " 5ms", " 2ms", " 1ms", "500us", "200us"}; // (48
const char * const hstring_table[] PROGMEM = {hRangeName[0], hRangeName[1], hRangeName[2], hRangeName[3], hRangeName[4], hRangeName[5], hRangeName[6], hRangeName[7]};
int waveBuff[REC_LENGTH]; // (RAM)
char chrBuff[10]; //
String hScale = "xxxAs";
String vScale = "xxxx";
float lsb5V = 0.0055549; // 5V0.005371 V/1LSB
float lsb50V = 0.051513; // 50V 0.05371
volatile int vRange; // 0:A50V, 1:A 5V, 2:50V, 3:20V, 4:10V, 5:5V, 6:2V, 7:1V, 8:0.5V
volatile int hRange; // 0:50m, 1:20m, 2:10m, 3:5m, 4;2m, 5:1m, 6:500u, 7;200u
volatile int trigD; // 0:1:
volatile int scopeP; // 0:, 1:, 2:
volatile boolean hold = false; //
volatile boolean paraChanged = false; // true
volatile int saveTimer; // EEPROM
int timeExec; // (ms)
int dataMin; // (min:0)
int dataMax; // (max:1023)
int dataAve; // 10 max:10230)
int rangeMax; //
int rangeMin; //
int rangeMaxDisp; // max100
int rangeMinDisp; // min
int trigP; //
boolean trigSync; //
int att10x; // 1
int SelecREFERENCIA = 0;
void setup()
{
// analogReference(INTERNAL); // ADC1.1Vvref)
//Serial.begin(9600);
//FreqCount.begin(1000);
pinMode(7, INPUT); // funcion OSCILOSCOPIO
pinMode(6, INPUT); // funcion VOLTIMETRO
pinMode(4, INPUT); // funcion INDUCTOMETRO
pinMode(2, INPUT_PULLUP); // (int0
pinMode(8, INPUT_PULLUP); // Select
pinMode(9, INPUT_PULLUP); // Up
pinMode(10, INPUT_PULLUP); // Down
pinMode(11, INPUT_PULLUP); // Hold
pinMode(12, INPUT); // 1/10
pinMode(13, INPUT); // funcion FRECUENCIMETRO
pinMode (PinADC, INPUT); //A1
pinMode (pinOFFset, INPUT); //A1
pinMode(5, OUTPUT);//output through a 150 ohm resistor to thr LC circuit
pinMode(3, INPUT);//Input from the comparator output//Use any other pin you select
// Serial.begin(115200); // RAM
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C))
{ // Address I2C 0x3C for 128x64
// Serial.println(F("SSD1306 failed"));
for (;;); //
}
loadEEPROM(); // EEPROM
attachInterrupt(0, pin2IRQ, FALLING); //
startScreen();
}
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
void loop()
{
// if (digitalRead(13) == LOW)
// {
// analogReference(DEFAULT);
// FreqCount.begin(1000);
// frecuencimetro();
// }
if (digitalRead(7) == LOW)
{
analogReference(INTERNAL); // ADC1.1Vvref)
//FreqCount.end();
osciloscopio();
}
if (digitalRead(6) == LOW)
{
analogReference(DEFAULT);
//FreqCount.end();
fuente();
}
if (digitalRead(4) == LOW)
{
analogReference(DEFAULT);
//FreqCount.end();
inductometro();
}
}
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
//void frecuencimetro()
//{
// if (FreqCount.available())
// {
// count = FreqCount.read();
// display.clearDisplay();
// display.setTextSize(1); // 2
// display.setTextColor(WHITE); //
// display.setCursor(5, 4); //(10, 25);
// display.println(F("Frecuencimetro")); //
// display.drawFastHLine(3, 2, 120, WHITE);
// display.drawFastHLine(3, 12, 120, WHITE);
// display.drawFastHLine(3, 62, 120, WHITE);
// display.drawFastVLine(3, 3, 60, WHITE);
// display.drawFastVLine(123, 3, 60, WHITE);
// display.setTextSize(1); // display.setTextSize(2);
// display.setTextColor(WHITE); //
// display.setCursor(5, 20); //
// display.println(F("Frecuencia:"));
// display.setCursor(15, 39); //
// display.println(count);
// display.setCursor(52, 39); //
// display.println(F(" Hz"));
// display.setCursor(52, 48); //
// display.display(); //
// delay(1000);
// display.clearDisplay();
// }
//}
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
void inductometro()
{
digitalWrite(5, HIGH);
delay(5);//give some time to charge inductor.
digitalWrite(5,LOW);
delayMicroseconds(100); //make sure resination is measured
pulse = pulseIn(3,HIGH,5000);//returns 0 if timeout
if(pulse > 0.1) //if a timeout did not occur and it took a reading:
{
// #error insert your used capacitance value here. Currently using 2uF. Delete this line after that
capacitance = 2.E-6; // <- insert value here
frequency = 1.E6/(2*pulse);
inductance = 1./(capacitance*frequency*frequency*4.*3.14159*3.14159);//one of my profs told me just do squares like this
inductance *= 1E6; //note that this is the same as saying inductance = inductance*1E6
inductance_mH = inductance * 1000; //note that this is the same as saying inductance = inductance*1E6
display.clearDisplay();
display.setTextSize(1); // 2
display.setTextColor(WHITE); //
display.setCursor(5, 4); //(10, 25);
display.println(F("INDUCTOMETRO")); //
display.drawFastHLine(3, 2, 120, WHITE);
display.drawFastHLine(3, 12, 120, WHITE);
display.drawFastHLine(3, 62, 120, WHITE);
display.drawFastVLine(3, 3, 60, WHITE);
display.drawFastVLine(123, 3, 60, WHITE);
display.setCursor(5, 16); //
display.println(F("High for uS:"));
display.setCursor(80, 16);
display.println(pulse);
display.setCursor(5, 25); //
display.println(F("\tFrec Hz:"));
display.setCursor(65, 25); //
display.println( frequency );
display.setCursor(5, 34); //
display.println(F("\tInd uH:"));
display.setCursor(55, 34);
display.println( inductance );
display.setTextSize(1); // 2
display.setTextColor(WHITE); //
display.setCursor(5, 43); //
display.println(F("\tInd mH:"));
display.setCursor(55,43);
display.println(inductance_mH);
display.display(); //
delay(900);
display.clearDisplay();
display.setTextSize(1); //
}
}
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
void fuente()
{
int analogvalue = analogRead (A1);
temp = (analogvalue * 5.0)/1024;
input_volt = temp/(r2/(r1+r2));
if (input_volt <0.1)
{
input_volt =0.0;
}
display.clearDisplay();
display.setTextSize(1); // 2
display.setTextColor(WHITE); //
display.setCursor(5, 4); //(10, 25);
display.println(F("VOLTIMETRO")); //
display.drawFastHLine(3, 2, 120, WHITE);
display.drawFastHLine(3, 12, 120, WHITE);
display.drawFastHLine(3, 62, 120, WHITE);
display.drawFastVLine(3, 3, 60, WHITE);
display.drawFastVLine(123, 3, 60, WHITE);
display.setTextSize(1); // display.setTextSize(2);
display.setTextColor(WHITE); //
display.setCursor(5, 20); //
display.println(F("Tension:"));
display.setCursor(15, 39); //
display.println(input_volt);
display.setCursor(52, 39); //
display.println(F(" V"));
display.setCursor(52, 48); //
display.display(); //
delay(1000);
display.clearDisplay();
//display.setTextSize(1); //
}
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
void osciloscopio()
{
digitalWrite(13, HIGH);
setConditions(); // RAM40
readWave(); // (1.6ms )
digitalWrite(13, LOW); //
dataAnalize(); // (0.4-0.7ms)
writeCommonImage(); // (4.6ms)
plotData(); // (5.4ms+)
dispInf(); // (6.2ms)
display.display(); // (37ms)
saveEEPROM(); // EEPROM
while (hold == true) { // Hold
dispHold();
delay(10);
}
}
void setConditions() { //
// PROGMEM
strcpy_P(chrBuff, (char*)pgm_read_word(&(hstring_table[hRange]))); //
hScale = chrBuff; // Escala Horizontal
//
strcpy_P(chrBuff, (char*)pgm_read_word(&(vstring_table[vRange]))); //
vScale = chrBuff; // Escala Vertical
switch (vRange) { //
case 0: { // Auto50V
// rangeMax = 1023;
// rangeMin = 0;
att10x = 1; //
break;
}
case 1: { // Auto 5V
// rangeMax = 1023;
// rangeMin = 0;
att10x = 0; //
break;
}
case 2: { // 50V
rangeMax = 50 / lsb50V; //
rangeMaxDisp = 5000; // 100
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 3: { // 20V
rangeMax = 20 / lsb50V; //
rangeMaxDisp = 2000;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 4: { // 10V
rangeMax = 10 / lsb50V; //
rangeMaxDisp = 1000;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 5: { // 5V
rangeMax = 5 / lsb5V; //
rangeMaxDisp = 500;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 6: { // 2V
rangeMax = 2 / lsb5V; //
rangeMaxDisp = 200;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 7: { // 1V
rangeMax = 1 / lsb5V; //
rangeMaxDisp = 100;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 8: { // 0.5V
rangeMax = 0.5 / lsb5V; //
rangeMaxDisp = 50;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 9: { // 0.5V
rangeMax = 0.2 / lsb5V; //
rangeMaxDisp = 20;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
}
}
void writeCommonImage() { //
display.clearDisplay(); // (0.4ms)
display.setTextColor(WHITE); //
display.setCursor(86, 0); // Iniciar en la parte superior izquierda
display.println(F("av V")); // 1
display.drawFastVLine(26, 9, 55, WHITE); //
display.drawFastVLine(127, 9, 55, WHITE); //
display.drawFastHLine(24, 9, 7, WHITE); // Max
display.drawFastHLine(24, 36, 2, WHITE); //
display.drawFastHLine(24, 63, 7, WHITE); //
display.drawFastHLine(51, 9, 3, WHITE); // Max
display.drawFastHLine(51, 63, 3, WHITE); //
display.drawFastHLine(76, 9, 3, WHITE); // Max
display.drawFastHLine(76, 63, 3, WHITE); //
display.drawFastHLine(101, 9, 3, WHITE); // Max
display.drawFastHLine(101, 63, 3, WHITE); //
display.drawFastHLine(123, 9, 5, WHITE); // Max
display.drawFastHLine(123, 63, 5, WHITE); //
for (int x = 26; x <= 128; x += 5) {
display.drawFastHLine(x, 36, 2, WHITE); // ()
}
for (int x = (127 - 25); x > 30; x -= 25) {
for (int y = 10; y < 63; y += 5) {
display.drawFastVLine(x, y, 2, WHITE); // 3
}
}
}
void readWave() { //
if (att10x == 1) { // 1/10
pinMode(12, OUTPUT); //
digitalWrite(12, LOW); // LOW
} else { //
pinMode(12, INPUT); // Hi-z
}
switch (hRange) { //
case 0: { // 50ms
timeExec = 400 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(1888); //
}
break;
}
case 1: { // 20ms
timeExec = 160 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(688); //
}
break;
}
case 2: { // 10 ms
timeExec = 80 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(288); //
}
break;
}
case 3: { // 5 ms
timeExec = 40 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(88); //
}
break;
}
case 4: { // 2 ms
timeExec = 16 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x06; // 64 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 56s
delayMicroseconds(24); //
}
break;
}
case 5: { // 1 ms
timeExec = 8 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x05; // 16 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 28s
delayMicroseconds(12); //
}
break;
}
case 6: { // 500us
timeExec = 4 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x04; // 16(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 16s
delayMicroseconds(4); //
// 1.875snop 110.0625s @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop");
}
break;
}
case 7: { // 200us
timeExec = 2 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x02; // :4(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) {
waveBuff[i] = analogRead(0); // 6s
// 1.875snop 110.0625s @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
}
break;
}
}
}
void dataAnalize() { //
int d;
long sum = 0;
//
dataMin = 1023; //
dataMax = 0; //
for (int i = 0; i < REC_LENGTH; i++) { //
d = waveBuff[i];
sum = sum + d;
if (d < dataMin) { //
dataMin = d;
}
if (d > dataMax) { //
dataMax = d;
}
}
//
dataAve = (sum + 10) / 20; // 10
// max,min
if (vRange <= 1) { // Auto1
rangeMin = dataMin - 20; // -20
rangeMin = (rangeMin / 10) * 10; // 10
if (rangeMin < 0) {
rangeMin = 0; // 0
}
rangeMax = dataMax + 20; // +20
rangeMax = ((rangeMax / 10) + 1) * 10; // 10
if (rangeMax > 1020) {
rangeMax = 1023; // 10201023
}
if (att10x == 1) { //
rangeMaxDisp = 100 * (rangeMax * lsb50V); // ADC
rangeMinDisp = 100 * (rangeMin * lsb50V); //
} else { //
rangeMaxDisp = 100 * (rangeMax * lsb5V);
rangeMinDisp = 100 * (rangeMin * lsb5V);
}
} else { //
//
}
//
for (trigP = ((REC_LENGTH / 2) - 51); trigP < ((REC_LENGTH / 2) + 50); trigP++) { //
if (trigD == 0) { // 0
if ((waveBuff[trigP - 1] < (dataMax + dataMin) / 2) && (waveBuff[trigP] >= (dataMax + dataMin) / 2)) {
break; //
}
} else { // 0
if ((waveBuff[trigP - 1] > (dataMax + dataMin) / 2) && (waveBuff[trigP] <= (dataMax + dataMin) / 2)) {
break;
} //
}
}
trigSync = true;
if (trigP >= ((REC_LENGTH / 2) + 50)) { //
trigP = (REC_LENGTH / 2);
trigSync = false; // Sin sincronismo (Unsync)
}
}
void dispHold() { // Congelar pantalla (Hold)
display.fillRect(32, 12, 24, 8, BLACK); // 4
display.setCursor(32, 12);
display.print(F("Hold")); // (Hold)
display.display(); //
}
void dispInf() { //
float voltage;
//
display.setCursor(2, 0); //
display.print(vScale); //
if (scopeP == 0) { //
display.drawFastHLine(0, 7, 27, WHITE); //
display.drawFastVLine(0, 5, 2, WHITE);
display.drawFastVLine(26, 5, 2, WHITE);
}
//
display.setCursor(34, 0); //
display.print(hScale); // Divisor escalar de tiempo(time/div)
if (scopeP == 1) { //
display.drawFastHLine(32, 7, 33, WHITE); //
display.drawFastVLine(32, 5, 2, WHITE);
display.drawFastVLine(64, 5, 2, WHITE);
}
//
display.setCursor(75, 0); //
if (trigD == 0) {
display.print(char(0x18)); //
} else {
display.print(char(0x19)); //
}
if (scopeP == 2) { //
display.drawFastHLine(71, 7, 13, WHITE); //
display.drawFastVLine(71, 5, 2, WHITE);
display.drawFastVLine(83, 5, 2, WHITE);
}
//
if (att10x == 1) { // 10
voltage = dataAve * lsb50V / 10.0; // 50V
} else {
voltage = dataAve * lsb5V / 10.0; // 5V
}
dtostrf(voltage, 4, 2, chrBuff); // x.xx
display.setCursor(98, 0); //
display.print(chrBuff); //
// display.print(saveTimer); //
//
voltage = rangeMaxDisp / 100.0; // Max
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // *.**
} else { //
dtostrf(voltage, 4, 1, chrBuff); // **.*
}
display.setCursor(0, 9);
display.print(chrBuff); // Max
voltage = (rangeMaxDisp + rangeMinDisp) / 200.0; //
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // 2
} else { //
dtostrf(voltage, 4, 1, chrBuff); // 1
}
display.setCursor(0, 33);
display.print(chrBuff); //
voltage = rangeMinDisp / 100.0; // Min
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // 2
} else {
dtostrf(voltage, 4, 1, chrBuff); // 1
}
display.setCursor(0, 57);
display.print(chrBuff); // Min
//
if (trigSync == false) { //
display.setCursor(60, 55); //
display.print(F("Unsync")); // Unsync
}
}
void plotData() { //
long y1, y2;
for (int x = 0; x <= 98; x++) {
y1 = map(waveBuff[x + trigP - 50], rangeMin, rangeMax, 63, 9); //
y1 = constrain(y1, 9, 63); //
y2 = map(waveBuff[x + trigP - 49], rangeMin, rangeMax, 63, 9); //
y2 = constrain(y2, 9, 63); //
display.drawLine(x + 27, y1, x + 28, y2, WHITE); //
}
}
void saveEEPROM() { // EEPROM
if (paraChanged == true) { //
saveTimer = saveTimer - timeExec; //
if (saveTimer < 0) { //
paraChanged = false; //
EEPROM.write(0, vRange); //
EEPROM.write(1, hRange);
EEPROM.write(2, trigD);
EEPROM.write(3, scopeP);
}
}
}
void loadEEPROM() { // EEPROM
int x;
x = EEPROM.read(0); // vRange
if ((x < 0) || (x > 9)) { // 0-9
x = 3; //
}
vRange = x;
x = EEPROM.read(1); // hRange
if ((x < 0) || (x > 7)) { // 0-9
x = 3; //
}
hRange = x;
x = EEPROM.read(2); // trigD
if ((x < 0) || (x > 1)) { // 0-9
x = 1; //
}
trigD = x;
x = EEPROM.read(3); // scopeP
if ((x < 0) || (x > 2)) { // 0-9
x = 1; //
}
scopeP = x;
}
void pin2IRQ() { // Pin2(int0)
//pin8,9,10,11Pin2
//
int x; //
x = PINB; // B
if ( (x & 0x07) != 0x07) { // 3High
saveTimer = 5000; // EEPROM(ms
paraChanged = true; // ON
}
if ((x & 0x01) == 0) {
scopeP++;
if (scopeP > 2) {
scopeP = 0;
}
}
if ((x & 0x02) == 0) { // UP
if (scopeP == 0) { //
vRange++;
if (vRange > 9) {
vRange = 9;
}
}
if (scopeP == 1) { //
hRange++;
if (hRange > 7) {
hRange = 7;
}
}
if (scopeP == 2) { //
trigD = 0; //
}
}
if ((x & 0x04) == 0) { // DOWN
if (scopeP == 0) { //
vRange--;
if (vRange < 0) {
vRange = 0;
}
}
if (scopeP == 1) { //
hRange--;
if (hRange < 0) {
hRange = 0;
}
}
if (scopeP == 2) { //
trigD = 1; //
}
}
if ((x & 0x08) == 0) { // HOLD
hold = ! hold; //
}
}
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////
void startScreen() { //
display.clearDisplay();
display.setTextSize(1); // 2
display.setTextColor(WHITE); //
display.setCursor(5, 4); //(10, 25);
display.println(F("Voltimetro-Ind-OSC")); //
display.drawFastHLine(3, 2, 120, WHITE);
display.drawFastHLine(3, 12, 120, WHITE);
display.drawFastHLine(3, 62, 120, WHITE);
display.drawFastVLine(3, 3, 60, WHITE);
display.drawFastVLine(123, 3, 60, WHITE);
display.setCursor(5, 20); //
display.println(F("Desing by:"));
display.setCursor(5, 29); //
display.println(F("Torres Alejandro M."));
display.setTextSize(2); // 2
display.setTextColor(WHITE); //
display.setCursor(5, 46); //
display.println(F(" BETA V1 "));
display.display(); //
delay(1500);
display.clearDisplay();
display.setTextSize(1); //
}
//////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////