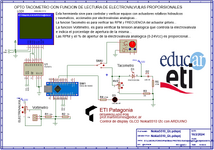
En este ejemplo, veremos como implementar estas pantallas graficas para desarrollar una practica herramienta que nos sirve para verificar el estado de actuadores rotativos (neumáticos o hidráulicos) verificando su RPM por medio de un Opto TACOMETRO, y en paralelo, tenemos una función para corroborar el estado de funcionamiento de electroválvulas analógicas empleadas en sistemas neumáticos e hidráulicos, verificando la tensión analógica y un calculo de "%" que le llega a los bornes de la electroválvula, para verificar luego la respuesta de esta.

CSS:
///////////////////////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////////////////////
////////// TACOMETRO OPTICO CON FUNCION VOLTIMETRO E INDICADOR DE APERTURA DE VALVULAS ANALOGICAS /////////
////////// prof.martintorres@educ.ar - ETI Patagonia /////////
///////////////////////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////////////////////
//#include <PCD8544.h>
#include <PCF8574_PCD8544.h>
//configuracion display 5110 I2C
PCF8574_PCD8544 display = PCF8574_PCD8544(0x20, 7, 6, 5, 4, 2);
// Variables de uso interno TACOMETRO//
volatile byte REV; // TIPO DE DATO VOLÁTIL PARA ALMACENAR REVOLUCIONES
unsigned long int rpm, maxRPM , frec; // DEFINIR RPM Y RPM MÁXIMAS
unsigned long time; // DEFINE EL TIEMPO NECESARIO PARA CUBRIR UNA REVOLUCIÓN
int led = 0,RPMlen , prevRPM; // VARIABLES DEL TIPO ENTEROS PARA ALMACENAR EL VALOR DEL LED Y LAS RPM ACTUALES Y LAS RPM ANTERIORES
int flag = 0; // VARIABLE BANDERA PARA DETERMINAR SI LA LCD NECESITA SER LIMPIADA O NO
long prevtime = 0; // ALMACENA EL TIEMPO DE INACTIVIDAD PARA CAMBIAR EL MENÚ
//Variables de uso interno VOLTIMETRO//
int analogInput = A0; //Definimos el pin analógico A0 para la lectura del voltaje
float vout = 0.0; //Definimos la variable Vout
float vin = 0.0; //Definimos la variable Vin
float R1 = 100000.0; // R1 (100K) Valor de la resistencia R1 del divisor de tensión
float R2 = 10000.0; // R2 (10K) Valor de la resistencia R2 del divisor de tención
float escala;
int value = 0; //Definimos la variable value
static const byte sensorPin = 0;
static const byte ledPin = 7;
void setup()
{
attachInterrupt(0, RPMCount, RISING); // CONFIGURACION DE INTERRUPCIÓN PARA CUANDO EL SENSOR CONMUTA DE ESTADO BAJO A ALTO
Serial.begin(9600); // OBTENER VALORES UTILIZANDO MONITOR SERIE
display.begin();
display.setContrast(60);
display.display(); //
display.clearDisplay(); //
pinMode(ledPin, OUTPUT);
REV = 0; // EMPEZAR TODAS LAS VARIABLES DESDE 0
rpm = 0;
frec = 0;
time = 0;
pinMode(analogInput, INPUT); //Activamos el input del pin analógico A0
pinMode(ledPin, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(3, HIGH); // PIN VCC DEL SENSOR IR
digitalWrite(4, LOW); // PIN GND DEL SENSOR
display.clearDisplay(); //
display.setTextSize(1);
display.setTextColor(BLACK);
display.setCursor(0, 0);
display.println("--------------");
display.setCursor(0, 7);
display.println("OPTICTACOMETRO");
display.setCursor(0, 15);
display.println("Desing by: ");
display.setCursor(0, 25);
display.println(" Torres A.M.");
display.setCursor(0, 35);
display.println("ETI Patagonia");
display.setCursor(0, 44);
display.println("--------------");
display.display();
delay(2000);
display.clearDisplay();
delay(10);
display.display();
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////////////////////
void loop()
{
long currtime = millis(); // OBTENER TIEMPO ACTUAL
long idletime = currtime - prevtime; // CALCULAR EL TIEMPO DE INACTIVIDAD
if(REV >= 5 ) // SE ACTUALIZARÁ DESPUÉS DE CADA 5 LECTURAS
{
if(flag==0) // BORRAR LA LCD PARA EVITAR CUALQUIER TEXTO BASURA
{
display.setCursor(0, 0);
display.println("--------------");
display.setCursor(0, 44);
display.println("--------------");
display.display();
flag=1; // DESPUÉS DE BANDERA = 1, EL BUCLE NO SE EJECUTARÁ DE NUEVO
}
rpm = 30*1000/(millis() - time)*REV; // CALCULAR RPM UTILIZANDO REVOLUCIONES Y TIEMPO TRANSCURRIDO
if(rpm > maxRPM)
maxRPM = rpm; // OBTENGA LAS RPM MÁXIMAS EN EL TIEMPO QUE ESTUVO DETECTANDO EL SENSOR
time = millis();
REV = 0;
int x= rpm; // CALCULAR NUMERO DE DIGITOS EN RPM
while(x!=0)
{
x = x/10;
RPMlen++;
}
if(RPMlen!=prevRPM) // SI LAS RPM CAEN A UN NÚMERO MÁS BAJO CON MENOS DÍGITOS, LA LCD SE BORRARÁ
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK);
prevRPM = RPMlen;
flag=0;
display.setCursor(0, 0);
display.println("------PP------");
display.setCursor(0, 44);
display.println("--------------");
display.display();
}
display.clearDisplay();
display.display();
display.setCursor(0, 0);
display.println("--------------");
display.setCursor(0, 7);
display.println("RPM:");
display.setCursor(25, 7);
display.println(rpm,DEC); // IMPRIMIR RPM EN SISTEMA DECIMAL
flag=1; // DESPUÉS DE LA BANDERA = 1, EL BUCLE NO VOLVERÁ A EJECUTARSE
////FRECUENCIMETRO
display.setCursor(0, 15);
display.println("Frec:");
frec = rpm / 60 ;
display.setCursor(27, 15);
display.println(frec,DEC);
////VOLTIMETRO
value = analogRead(analogInput); //Leemos el pin analógico A0
vout = (value * 5.0) / 1024.0; // Cálculo para obtener el Vout
vin = vout / (R2/(R1+R2)); // Cálculo para obtener Vin del divisor de tensión
escala=vin;
if (vin<0.09) { //Si la lectura de Vin es menor que 0.09V le decimos que nos muestre 0
vin=0.0;
}
escala = map(escala,0,24,0,100);
display.setCursor(0, 25);
display.println("T.EV:");
display.setCursor(27, 25);
display.println(vin);
display.setCursor(0, 35);
display.println("% EV:");
display.setCursor(27, 35);
display.println(escala);
display.setCursor(0, 44);
display.println("--------------");
display.display();
delay(500);
prevtime = currtime; // RESET TIEMPO INACTIVO
}
if(idletime > 5000 ) // SI NO HAY LECTURAS DURANTE 5 SEGUNDOS, LA PANTALLA MOSTRARÁ RPM MÁXIMAS
{
if(flag==1) // LIMPIA LA PANTALLA DEL DISPLAY LCD
{
display.clearDisplay();
delay(500);
display.display();
flag=0;
}
display.clearDisplay(); //
display.setTextSize(1);
display.setTextColor(BLACK);
display.setCursor(0, 0);
display.println("--------------");
display.setCursor(0, 7);
display.println("MAX RPM MEDIDA");
display.setCursor(5, 15);
display.println("-> ");
display.setCursor(25, 15);
display.println(maxRPM,DEC); // IMPRIME EN EL DISPLAY LAS RPM MAX
/////
value = analogRead(analogInput); //Leemos el pin analógico A0
vout = (value * 5.0) / 1024.0; // Cálculo para obtener el Vout
vin = vout / (R2/(R1+R2)); // Cálculo para obtener Vin del divisor de tensión
escala=vin;
if (vin<0.09) { //Si la lectura de Vin es menor que 0.09V le decimos que nos muestre 0
vin=0.0;
}
escala = map(escala,0,24,0,100);
display.setCursor(0, 25);
display.println("T.EV:");
display.setCursor(27, 25);
display.println(vin);
display.setCursor(0, 35);
display.println("% EV:");
display.setCursor(27, 35);
display.println(escala);
display.setCursor(0, 44);
display.println("--------------");
display.display();
delay(2000);
display.clearDisplay();
display.display();
display.setTextSize(1);
display.setTextColor(BLACK);
display.setCursor(0, 0);
display.println("--------------");
display.setCursor(0, 7);
display.println("estadoINACTIVO");
display.setCursor(0, 15);
display.println("LISTOparaMEDIR");
/////
value = analogRead(analogInput); //Leemos el pin analógico A0
vout = (value * 5.0) / 1024.0; // Cálculo para obtener el Vout
vin = vout / (R2/(R1+R2)); // Cálculo para obtener Vin del divisor de tensión
escala=vin;
if (vin<0.09) { //Si la lectura de Vin es menor que 0.09V le decimos que nos muestre 0
vin=0.0;
}
escala = map(escala,0,24,0,100);
display.setCursor(0, 25);
display.println("T.EV:");
display.setCursor(27, 25);
display.println(vin);
display.setCursor(0, 35);
display.println("% EV:");
display.setCursor(27, 35);
display.println(escala);
display.setCursor(0, 44);
display.println("--------------");
display.display();
delay(2000);
prevtime = currtime;
}
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////////////////////
void RPMCount() // CADA VEZ QUE EL SENSOR CONMUTA DE ESTADO BAJO A ALTO, ESTA FUNCIÓN SERÁ INVOCADA
{
REV++; // AUMENTAR LOS DISPAROS
if (led == LOW)
{
led = HIGH; // CAMBIAR ESTADO DEL LED
}
else
{
led = LOW;
}
digitalWrite(ledPin, led);
}
////////////////////////////////////////////////////////////// FIN DEL PROGRAMA ///////////////////////////////////////////////////////////////////////