hola a todos,,,,,
quiero dar gracias de antemano a Meta por sus aportes, logre terminar mi aplicacion de control para vehiculo de exploracion....
como habia comentado antes, tenia mis problemas con la realizacion del radar.... logre solucionarlos con la ayudad de un amigo que realizao una dll para un picture box que permite modificar ahora un parametro de rotacion de 0 a 360 grados,,,
sin mas palabras aqui esta la interfaz y el circuito en proteus para quien lo quiera probar... me habia demorado debido a que mi disco duro se averio y no logre recuperar la info, asi que esta es la penultima version del programa, logre encontrarla en mi memoria,,, esta casi terminado ya indicare lo que le falta.
bueno la interfaz permite manejar la direccion del vehiculo de una forma muy didactica, con un volante que se controla con las teclas de dirreccion, cuenta con tres velocidades, que se suben con w y se baja con s, si das atras en las teclas de direccion da reversa, en esa parte todo va bn, lo unico es que cuando vva hacia adelante en el velocimetro indica ir atras y viceversa, es algo simple,,,,
por otro lado existe un boton llamado inspeccionar terreno, el cual detiene el vehiculo y recibe los datos del sensor para inspeccionar obstaculos y otros parametros, en esta version solo se miden obstaculos,,, un inconveniente que repare en la ultima version pero que sigue presente en este, es que se debe iniciar la simulacion del pic primero, y luego la interfaz, debido a que falto algo en la sincronizacion de la interfaz y el pic, en real hay que encender el vehiculo primero, el sensor utilizado es un sfr04 con 6mts de alcanze, el cual me habian recomendado, ...
utilize el eltima serial port driver para crear com1 y com2 para unir la simulacion con la interfaz,,,,
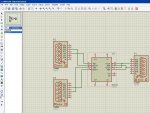
en la simulacion podran ver dos pic, un 4550 y un 2550, el 2550 esta desactivada la simulacion, ya que es un control remoto, donde no se pueda tener un pc, se controla por control, utilize carcasa y joystick de uno de play, jeje como modulo de rf, utilize un xbee pro que tiene un alcanze de 1.5 Kmts y maneja comunicacion serial...
la dlll rimage.dll para el giro la realizao un amigo, andres eduardo ojeda, creditos sobre ella para el.. muchas gracias,,,
el codigo del pic lo realize en c con pic ccs, cualquier ayuda que pueda brindar en este lenguaje para pic, con mucho gusto..
eso es todo jejeje
por otro lado me encuentro realizando otra aplicacion con un pic 18f2550, comunicacion por usb para un dispositivo de medicion, ya que no he logrado realizar comunicacion usb en visual, realizo comunicacion serial normal, y en el pic implemento usb cdc, que es un modo en el que al conectar el usb se crea un com y se trabaja de la misma forma que rs232,,,, si alguien sabe como realizar comunicacion usb en vb.net le agradeceria....
mi duda acerca de esto es que utilizo el evento datareceived,,, y cada vez que envio algo al pic el me devuelve 3 datos en dependencia de lo que necesito, todo va bn, recibo los datos bn y los envio bn, el unico proble se presenta cuando oprimo un boton desconectar para cerrar el pierto, me genera que se sale por un evento inesperado, supuestamente esta recibiendo datos, pero la interfaz solo envia datos mientras este activado un timer, y al dar desconectar lo que hago es desactivar ese timer y cerrar el puerto, pero me sigue generando ese error la verdad no se como arreglarlo, he puesto incluso discardinbuffer, para descartar lo que llega pero sigue saliendo el error.... les agradeceria su ayudad estudio ing electronica y lo que he aprendido de visual es gracias al foro, asi que tengo bastantes falencias,,,,
por otro lado, y en base a lo planteado por meta, realizo lo de funcionamiento en segundo plano, pero al realizar esto, mi formulario no recibe la orden de iniciar en el centro de la pantalla, ahora aparece donde quiera, por que sera??? [/LEFT]



")