Si quieres velocidad, fuerza y precisión y para un CNC, mejor un SERVO con controlador AD HOC.
Con un motor Stepper, si quieres ir rápido perderás precisión.
El término medio, va a ser unos 100 a 300 RPM máximo. Cuando mas rápido vayas mas pasos perderás. Por eso a menudo estos accionamientos van solidarios a REGLAS diferenciales de referencia, que les permiten recomponer el paso perdido. ( a menudo agregando rutinas de corrección de errores )
Trabajé largos años con STEPPERs y hay que hacer muy bien las cuentas para no llorar.
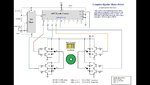
Este controlador de abajo te allana bastante el camino y evita que quemes cosas que después lamentes en el bolsillo.
Sobre todo si lo que estas usando, o tocando es ajeno.
Recuerda que el descontrol de estos aparatos, conectados a herramientas operadas por terceros, que NO seas tu, puede tener consecuencias legales y/o económicas. Es decir, que no salgan de tus manos o tu casa.
Te sugiero trabajar con los pasos
naturales del motor y evitar los micro-pasos del Driver, porque tienden a perder pasos.
Los naturales del motor, te permiten ir un poco mas rápido en RPM, pero a pasos mas espaciados. Tu debes elegir lo mejor para la tarea que te convoca.
Los campos y pasos naturales del motor generan un campo mas fuerte que evitan que la herramienta asociada se mueva de posición , sobre todo en descanso.
Prestar atención a las rutinas de
descanso en posición, para que el motor no recaliente. El recalentado a largo plazo, hace perder magnetismo al motor y lo termina arruinando. OJO