Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
Jeje amigo en realidad no brilla tanto, el video lo resalta bastante, se puede dormirWOW re WOW , si me deja dormir de noche, me gusta para navidad !!!Me preguntaba donde logró conseguir esas partes tan antiguas y funcionando y lo segundo
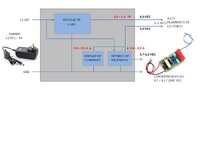
¿ posicionador geográfico de que ? ¿ arroja la actual posición GPS donde se encuentra el objeto ?
Los tubos salieron de mis afortunadas búsquedas de joyas vintage. ) y también provee los datos de Latitud y Longitud de su posición geográfica. ¡¡¡NO TOCAR!!! sobre estos será muy conveniente
¡¡¡NO TOCAR!!! sobre estos será muy conveniente 










| Q1(Rojo) | Q2(Verde) | Q3(Azul) | Color |
|---|---|---|---|
| 0 | 0 | 0 | Apagado |
| 0 | 0 | 1 | Azul |
| 0 | 1 | 0 | Verde |
| 0 | 1 | 1 | Cian |
| 1 | 0 | 0 | Rojo |
| 1 | 0 | 1 | Magenta |
| 1 | 1 | 0 | Amarillo |
| 1 | 1 | 1 | Blanco |



; INICIALIZAR RX TX USART
bcf STATUS,RP1 ;apuntar
bsf STATUS,RP0 ;banco1
; Ajustar divisor para 9600 baudios para Xtal de 8MHZ
movlw 0x33 ; cargar el divisor baurate con 51 (33h), da 9615 = 8.000.000/(16*(51+1) , manual pag. 71
movwf SPBRG ;para clock 8MHz da 9615 o sea +0,16 de error;
;
bsf TXSTA,BRGH ;set modo High Speed
bcf TXSTA,SYNC ;set modo asincrónico
;
bcf STATUS,RP0 ;apuntar banco 0
bsf RCSTA,SPEN ;conectar RB1 y RB2 como RX y TX, TRISB 1 y 2 deben ser 1 (buffer de salida desconectado)
bsf STATUS,RP0 ;apuntar banco 1
bsf TXSTA,TXEN ;Habilitar transmison , queda esperando el dato a transmitir
bsf PIE1,RCIE ;Habilitar interrupcion de recepcion
bcf STATUS,RP0 ;Apuntar banco 0
bsf RCSTA,CREN ;Habilitar recepcion de datos seriales en RB1 (RXD)
;Habilitar interrupciones
bsf INTCON,PEIE ; periheral interrup enable (incluye usart)
bsf INTCON,GIE ; all interrup enableORG 0x0004 ; interrupt vector location
movwf WTEMP ; salvar el W
movfw STATUS,W ; salvar el
movwf STEMP ; STATUS
bcf STATUS,RP1 ; apuntar
bcf STATUS,RP0 ; banco 0
call usa_rt ; llamando a procesar el dato que llegó
;
movf STEMP,W ; recuperar W y STATUS
movwf STATUS ;
movf WTEMP,W
retfie ; return from interruptusa_rt
;
bsf PORTB,AZA4 ;apagar el Led indicador de errores
;
btfss PIR1,RCIF ; llego un caracter, ver como esta el flag de recepcion, debe estar encendido sino es ilogico
goto err_flag ;hay algun error ilogico!!!
ckc_ferr ; llego un dato, primero procesar errores
btfsc RCSTA,FERR ;ver si hay error FRAME (o sea que NO se detecto el bit de STOP )
goto err_ferr ; si hay error FRAME
ckc_over
btfsc RCSTA,OERR ;ver si hay error OVERRUN, si llego un dato y el anterior no se leyó!
goto err_over ; si hay error Over
sin_error ;ninguno de los dos errores fue detectado
movf RCREG,w ; se resetea el flag de interrupcion RCIF, el FERR y el dato recibido pasa al W
movwf RCDATO ;se guarda el dato recibido
goto case_00 ; ir a procesar el Dato recibido!
;
;procesar errores, enciende LED indicador y resetea Flags de errores, el dato se procesa igual
err_flag
err_ferr
; encender el Led indicador de error, el proximo caracter correcto lo apaga
bcf PORTA,AZA4 ;encender el indicador de error
goto sin_error ; si el Led enciende permanente hay un problema
err_over
bcf RCSTA,CREN ;resetear error Overrun
nop
bsf RCSTA,CREN ;habilitar RX
goto err_flag ; encender el Led indicador de errores y continuar
;
;-------------------------------------------------------------------------------------
case_00
;case_00 ;procesar estado 0 (reposo) de la máquina de estados
;
movfw ESTADO ; Comparar
xorlw 0x00 ; con estado 0
btfss STATUS,Z ;si son iguales saltar
goto case_01 ; no es 0, continuar
;el estado es 0, procesarlo
movfw RCDATO ;el ESTADO es 0 (reposo), verifcar si llego $
xorlw 0x24 ; comparar con $, el primer caracter del encabezamiento $GNRMC
btfsc STATUS,Z ; ver si llego $, si no llego saltear cambio de ESTADO
goto si_PP ;exito!, estado 0 y llego un $ ,
clrf ESTADO ;no exito, esta en 0 pero no es $ lo que llegó
return ;resetear ESTADO y volver (aca no haria falta resetear)
si_PP ;en ESTADO 0 llego un $, pasar al estado 1 y no echoar dato
movlw 0X01 ; cargar el estado 01
movwf ESTADO ;pasar al estado 01 de la maquina de estados
return
;
case_01 ;procesar estado 1 y caracter "G"
;
movfw ESTADO ; Comparar
xorlw 0x01 ; con estado 1
btfss STATUS,Z ;si son iguales saltar
goto case_02 ; no es 1, continuar
movfw RCDATO ;el ESTADO es 1, verifcar si llego el caracter G
xorlw 0x47 ; comparar con "G" (código ASCII en exadecimal)
btfsc STATUS,Z ; ver si llego G, si no llego saltear cambio de ESTADO
goto si_GG ;exito, estado en 1 y llego un G
clrf ESTADO ;no exito, esta en 1 pero no es G
return ;resetear ESTADO y volver, la secuencia exitosa se abortó
si_GG ;en ESTADO 1 llego un G, pasar al estado 2 y no echoar dato
movlw 0x02
movwf ESTADO ;pasar al estado 02
;call echo_ar ;NO hacer eco del dato G a la PC
return
;
case_02 ;procesar estado 2 y "N"
movfw ESTADO ; Comparar
xorlw 0x02 ; con estado 2
btfss STATUS,Z ;si son iguales saltar
goto case_03 ; no es 2, continuar
movfw RCDATO ;el ESTADO es 2, verifcar si llego "N"
xorlw 0x4E ; comparar con N en ASCII exadecimal
btfsc STATUS,Z ;ver si llego N, si no llego saltear cambio de ESTADO
goto si_NN ;exito, esta en estado 1 y llego un G
clrf ESTADO ;no exito, esta en 1 pero no es G
return ;resetear ESTADO y volver
si_NN ;en ESTADO 2 y llego una N, pasar al estado 3 y no echoar dato
movlw 0x03
movwf ESTADO ;pasar al estado 03
;call echo_ar ;hacer eco del dato N a la PC
return
;
case_03 ;procesar estado 3 y R
movfw ESTADO ; Comparar
xorlw 0x03 ; con estado 3
btfss STATUS,Z ;si son iguales saltar
goto case_04 ; no es 3, continuar
movfw RCDATO ;el ESTADO es 3, verifcar si llego "R"
xorlw 0x52 ; comparar con R
btfsc STATUS,Z ;ver si llego M, si no llego saltear cambio de ESTADO
goto si_RR ;exito, estado en 3 y llego un R
clrf ESTADO ;no exito, esta en 3 pero no es R
return ;resetear ESTADO y volver
si_RR ;en ESTADO 3 llego un R, pasar al estado 4 y no echoar dato
movlw 0x04
movwf ESTADO ;pasar al estado 04
;call echo_ar ;hacer eco del dato G a la PC
return
;
case_04 ;procesar estado 4 y M
movfw ESTADO ; Comparar
xorlw 0x04 ; con estado 4
btfss STATUS,Z ;si son iguales saltar
goto case_05 ; no es 0, continuar
movfw RCDATO ;el ESTADO es 4, verifcar si llego "M"
xorlw 0x4D ; comparar con "M"
btfsc STATUS,Z ;ver si llego M, si no llego saltear cambio de ESTADO
goto si_MM ;exito, estado en 4 y llego un M
clrf ESTADO ;no exito, estado en 4 pero no es M
return ;resetear ESTADO y volver
si_MM ;en ESTADO 4 llego un M, pasar al estado 5 y no echoar dato
movlw 0x05
movwf ESTADO ;pasar al estado 05
;call echo_ar ;hacer eco del dato M a la PC
return
;
case_05 ;procesar estado 5 y "C"
movfw ESTADO ; Comparar
xorlw 0x05 ; con estado 5
btfss STATUS,Z ;si son iguales saltar
goto case_06 ; no es estado 5, continuar
movfw RCDATO ;el ESTADO es 5, verifcar si llego "C"
xorlw 0x43 ; comparar con C
btfsc STATUS,Z ;ver si llego C, si no llego saltear cambio de ESTADO
goto si_CC ;exito, estado en 5 y llego un C
clrf ESTADO ;no exito, estado en 5 pero no es C
return ;resetear ESTADO y volver
si_CC ;en ESTADO 5 llego un C, pasar al estado 6 y no echoar dato
movlw 0x06
movwf ESTADO ;pasar al estado 06
;call echo_ar ;hacer eco del dato C a la PC
return
;
case_06 ;procesar estado 6 y , procesar la coma "," que sigue al encabezamiento
movfw ESTADO ; Comparar
xorlw 0x06 ; con estado 6
btfss STATUS,Z ;si son iguales saltar
goto case_10 ; no es 6, continuar
movfw RCDATO ;el ESTADO es 6, verifcar si llego ","
xorlw 0x2C ; comparar con , o 2E es . punto
btfsc STATUS,Z ;ver si llego "," , si no llego saltear cambio de ESTADO
goto si_CO ;exito, estado en 6 y llego un , pongo CO la , molesta
clrf ESTADO ;no exito, esta en 6 pero no es ,
return ;resetear ESTADO y volver
si_CO ;en ESTADO 6 llego una ,, pasar al estado 10 y no echoar dato
movlw 0x10 ;
movwf ESTADO ;pasar al estado 10
;call echo_ar ;hacer eco del dato M a la PC
return
;
;La detección del encabezamiento fue exitosa, comienza recolección de datos de Hora
;
case_10 ;Recibiendo HORHIG (las decenas de Hora, viene en ASCII, o una segunda coma si no hay datos)case_10 ;Recibiendo HORHIG , el dígito Decenas de Horas, viene en ASCII
;o la segunda coma si todavía no hay datos (módulo inicializandose)
; , o el botón para mostrar Posición Geográfica
movfw ESTADO ; Comparar
xorlw 0x10 ; con estado 10
btfss STATUS,Z ;si son iguales saltar
goto case_11 ; no es estado 10, continuar
movfw RCDATO ;el ESTADO es 10, llega HORHIG en ASCII, le sobran 30 para obtener el número a mostrar
xorlw 0x2C ; comparar con la segunda coma para detectar el mensaje de NO DATA $GNRMC,,V,,,,,,,,,,N*4D
btfsc STATUS,Z ; si no es coma, continuar, pues no es el mensaje de NO DATA (el módulo aún no no adquiere info de los GNSS)
goto es_coma ;se detecta la segunda coma, todavia no llegan los datos válidos
movfw RCDATO ;si no es coma, recuperar dato recibido y procesarlo
andlw 0x0F ; mascara para borrar ASCII, sacarle el 30; el 30 queda en 00, 31 en 01 etc.
movwf HORHIX ; cargar el digito de hora en registro auxiliar HORHIX (es hora UTC, no local)
;chequear boton de solicitud de mostrar Posición geográfica
btfss PORTB,BTB3 ;si el boton no fue apretado,esta en 1, seguir, saltar
goto bot_on ;si hay boton oprimido, ir a procesar latitud/longitud ; si no continuar normal con hora y fecha
movlw 0x11
movwf ESTADO ;pasar al estado 11
call echo_ar ;hacer eco del dígito de Hora HORHIG a la PC para chequear su validez
return
;
bot_on ;el boton esta oprimido, ir a recoger latitud y longitud y mostrala. Ya se recibio HORHIG pero ese valor se descarta
movlw 0x02 ;cargar el contador de comas a saltear dentro del mensaje, son 2
movwf ESTAUX ; en ESTAUX
movlw 0x40 ; el proximo estado de la maquina de estados sera el 40, arranca la secuencia de recoger latitud y longitud
movwf ESTADO ;pasar al estado 40
return
es_coma ;se detecto una segunda coma despues de la primera, el mensaje completo $GNRMC con todos los datos todavia no llega
movlw 0x36 ; estado final 36, para no mandar nada pues esta llegando el mensaje sin data $GNRMC,,V,,,,,,,,,,N*4D
movwf ESTADO ;pasar al estado 36, solo para mandar $+CR+LF e ir al estado de reposo 38, el último estado de la maquina
movlw 0x24 ;echoar el signo $ a la PC, luego CR,LF; la HiperTerminal de monitoreo mostrará el signo $, una linea por segundo
call tx_dato ; mientras no llega Data (el módulo GPS esta en inicialización o perdió toda señal)
return ;
;No hubo segunda coma , no hubo Boton, la secuencia continua normalmente recogiendo los dígitos de Hora
case_11 ;Recibiendo el dígito de Unidades de Hora, se guarda en registro HORLOX , viene en ASCII
movfw ESTADO ; Comparar
xorlw 0x11 ; con estado 11
btfss STATUS,Z ;si son iguales saltar
goto case_12 ; no es 11, continuar
movfw RCDATO ;el ESTADO es 11, llega el dígito de unidades de Horas HORLOX en ASCII, le sobran 30
andlw 0x0F ; mascara para borrar ASCII, 30 queda en 00, 31 en 01 etc.
movwf HORLOX ; cargar el digito de hora en registro auxiliar HORLOX para corregir hora UTC a hora local
movlw 0x12
movwf ESTADO ;pasar al estado 12
call echo_ar ;hacer eco del dígito a la PC
return
;
case_12 ;Recibiendo decenas de Minutos, se guarda en el registro MINHIG , viene en ASCII
movfw ESTADO ; Comparar
xorlw 0x12 ; con estado 12
btfss STATUS,Z ;si son iguales saltar
goto case_13 ; no es 12, continuar
movfw RCDATO ;el ESTADO es 12, llega MINHIG en ASCII, le sobran 30
andlw 0x0F ; mascara para borrar ASCII, 30 queda en 00, 31 en 01 etc
movwf MINHIG ; cargar el digito de MINHIG
movlw 0x13
movwf ESTADO ;pasar al estado 13
call echo_ar ;MINHIG a la PC
return
;
case_13 ;Recibiendo unidades de minutos, se guarda en MINLOW , viene en ASCII
movfw ESTADO ; Comparar
xorlw 0x13 ; con estado 13
btfss STATUS,Z ;si son iguales saltar
goto case_14 ; no es 13, continuar
movfw RCDATO ;el ESTADO es 13, llega MINLOW en ASCII, le sobran 30
andlw 0x0F ; mascara para borrar ASCII, 30 queda en 00, 31 en 01 etc
movwf MINLOW ; cargar el digito MINLOW
movlw 0x14
movwf ESTADO ;pasar al estado 14
call echo_ar ;hacer eco de MINLOW a la PC
return
;
case_14 ;Recibiendo digito de decenas de Segundos, guardar en SEGHIG , viene en ASCII
movfw ESTADO ; Comparar
xorlw 0x14 ; con estado 14
btfss STATUS,Z ;si son iguales saltar
goto case_15 ; no es 14, continuar
movfw RCDATO ;el ESTADO es 14, llega SEGHIG en ASCII, le sobran 30
andlw 0x0F ; mascara para borrar ASCII, 30 queda en 00, 31 en 01 etc
movwf SEGHIG ; cargar el digito SEGHIG
movlw 0x15
movwf ESTADO ;pasar al estado 15
call echo_ar ;hacer eco de SEGHIG a la PC
return
;
case_15 ;Recibiendo unidades de Segundos, guardar en SEGLOW ,
movfw ESTADO ; Comparar
xorlw 0x15 ; con estado 15
btfss STATUS,Z ;si son iguales saltar
goto case_16 ; no es 15, continuar a 16
movfw RCDATO ;el ESTADO es 15, llega SEGLOW en ASCII, le sobran 30
andlw 0x0F ; mascara para borrar ASCII, 30 queda en 00, 31 en 01 etc
movwf SEGLOW ; cargar el digito SEGLOW
movlw 0x16
movwf ESTADO ;pasar al estado 16
call echo_ar ;hacer eco de SEGLOW a la PC
return
;
case_16 ;Recibiendo el punto decimal de las centecimas de Segundos en el mensaje, viene en ASCII
movfw ESTADO ; Comparar
xorlw 0x16 ; con estado 16
btfss STATUS,Z ;si son iguales saltar
goto case_17 ; no es 16, ir a 17
movfw RCDATO ;el ESTADO es 16, verifcar si llego el "."
xorlw 0x2E ; comparar con . punto
btfsc STATUS,Z ; si no llego, hay error, en ese lugar debe haber un punto, si no está hay error, ergo resetear estado
goto si_PU ; si se detecta el "." ir a seguir la secuencia exitosa
clrf ESTADO ;no se detecto el "."
return ;resetear ESTADO y volver
si_PU ;
movlw 0x17
movwf ESTADO ;pasar al estado 17
call echo_ar ;hacer eco del punto decimal a la PC
return
case_17 ;Recibiendo el cero 0X de las centecimas de Segundo en el mensaje, viene en ASCII
movfw ESTADO ; Comparar
xorlw 0x17 ; con estado 17
btfss STATUS,Z ;si son iguales saltar
goto case_18 ; el estado no es 17,
movfw RCDATO ;el ESTADO es 17, verifcar si llego 0 (el modo del módulo no reporta decimales, estos siempre serán ceros)
xorlw 0x30 ; comparar con 0
btfsc STATUS,Z ; si no llego 0, hay error, resetear estado
goto si_0X ; si llego el 0, seguir secuencia
clrf ESTADO ;no era 0
return ;resetear ESTADO y volver
si_0X ;
movlw 0x18
movwf ESTADO ;pasar al estado 18
movlw 0x0D ; en lugar de mandar las centesimas que siempre son 00, mandar CR(0Dh), luego LF (0Ah)
call tx_dato ; para que la linea del HiperTerminal de monitoreo muestre la Hora y avance una linea
return
case_18 ;Recibiendo el cero x0 o segundo cero de las centecimas, viene en ASCII
movfw ESTADO ; Comparar
xorlw 0x18 ; con estado 18
btfss STATUS,Z ;si son iguales saltar
goto case_20 ; no es 18, sera 20?
movfw RCDATO ;el ESTADO es 18, verifcar si llego 0
xorlw 0x30 ; comparar con 0 en ASCII
btfsc STATUS,Z ; si no llego 0, hay error, resetear estado
goto si_X0 ; si llego el 0 , seguir secuencia
clrf ESTADO ;no era "0"
return ;resetear ESTADO y volver
si_X0 ;
movlw 0x08 ; ACA cargar el contador de comas a saltear, parámetros que no son requeridos son salteados, SON 8!
movwf ESTAUX ; en el registro ESTAUX
movlw 0x20
movwf ESTADO ;pasar al estado 20 de la máquina de estados
movlw 0x0A ; mandar LF (0Ah) para completar la linea en la HiperTerminal
call tx_dato ;
return
case_20 ;aquí se cuentan las 8 comas que separan la Hora de la Fecha en el mensaje, luego se recoge la Fecha con secuencia
;de estados similar a la Hora y se cargan sus registros.;------------------------------------------------------------------------------
;--- MOSTRAR HORA, MIN, SEG EN EL DISPLAY, "SHIFTEANDO" LOS BITS EN LOS REGISTROS
;------------------------------------------------------------------------------
;
; El orden de envío serial de los números será HU, MD, MU, SD, SU, y HD que será 0 o 1
; luego se envían los bits de Back Light
;
mos_hor ; mostrar hora,min,seg, "SHIFtiando" el dato de memoria en los registros de desplazamiento
;CKB7 (RB7) es el Clock (CK) de los registros. Recordar que los transistores de cambio de tensión
;DTB6 (RB6) es el Dato (DT) de los registros invierten las señales CK y DT
;
;mandar hora low HU, las unidades de Hora están en los 4 bits < peso de HORLOW
bsf PORTB,DTB6 ; Poner Datos a 1, o sea 0 en los registros (el Transistor de conversión de nivel invierte)
btfsc HORLOW,0 ; si el bit esta en 0 no hacer nada, el T ya esta en 0
bcf PORTB,DTB6 ; si el bit esta en 1, poner DT a 0 pues el T invierte y estara en 1
call Pulso ; Pulsar CK para cargar/shiftear el bit en los registros
btfsc HORLOW,1 ; continuar con los restantes 3 bits del registro
bcf PORTB,DTB6 ;
call Pulso
btfsc HORLOW,2 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc HORLOW,3 ;
bcf PORTB,DTB6 ;
call Pulso
;
;mandar minutos high MD, las decenas de Minutos están en los 4 bits < peso de MINHIG
btfsc MINHIG,0 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc MINHIG,1 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc MINHIG,2 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc MINHIG,3 ;
bcf PORTB,DTB6 ;
call Pulso
;
;mandar minutos low MU
btfsc MINLOW,0 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc MINLOW,1 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc MINLOW,2 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc MINLOW,3 ;
bcf PORTB,DTB6 ;
call Pulso
;
;mandar segundos high SD
btfsc SEGHIG,0 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc SEGHIG,1 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc SEGHIG,2 ;
bcf PORTB,DTB6 ;
call Pulso
btfsc SEGHIG,3 ;
bcf PORTB,DTB6 ;
call Pulso
;
;mandar segundos low SU
btfsc SEGLOW,0 ; Si el bit es UNO
bcf PORTB,DTB6 ; apagar o sea encender el T
call Pulso ; pulsa el Clock y deja en cero la salida
btfsc SEGLOW,1 ;
bcf PORTB,DTB6 ; apagar o sea encender
call Pulso
btfsc SEGLOW,2 ;
bcf PORTB,DTB6 ; apagar/encender
call Pulso
btfsc SEGLOW,3 ;
bcf PORTB,DTB6 ;
call Pulso
;
;mandar hora high HD, Decenas de Horas el HD es "apagado o 1"
btfsc HORHIG,0 ; HORHIG sera 0000 entonces apagar
bcf PORTB,DTB6 ; HORHIG = 0001 entonces encender el 1 del medio digito
call Pulso
;Aqui se mandan los 3 bits del RGB del back light
btfsc BACLIG,0 ; mandar el bit R serán Q1, Q2 y Q3 del ultimo registro
bcf PORTB,DTB6 ;
call Pulso
btfsc BACLIG,1 ;mandar el bit G Mandar el estado del contador de BACLIG
bcf PORTB,DTB6 ;
call Pulso
btfsc BACLIG,2 ; mandar el bit B
bcf PORTB,DTB6 ;
call Pulso
;
return
;---------------- FIN DE MOSTRAR HORA
Pulso ; el Clock de los registros de desplazamiento
nop ;Los NOPs regulan el ancho de pulso y los tiempos de bajada y subida
nop ; los colectores de los transistores con resistencia manejando entradas CMOS dan un tiempo de subida de 2 uS
nop ;
nop ;estabilizar la salida con NOPs
nop
nop
bcf PORTB,CKB7 ;flanco descendente, flanco ascendente en los registros, se produce el SHIFT
nop ; el tiempo que el PULSO esta en 0 (1)
nop
nop
nop ;estabilizar la salida
nop
nop
bsf PORTB,CKB7 ;pasa a 1 (cero) el pulso
nop ;estabilizar la salida
nop
nop
nop
nop
nop
bsf PORTB,DTB6 ; y dejar la salida en 1 (0) Los transistores invierten
return
;-------------------------------------------------------------------------------------------
;
; La rutina de proceso del Back Light, es llamada cada de 7 a 10 minutos para el cambio de código de color
baklig
;AQUI PROCESAR EL BACKLIGHT
incf CONLIG,1 ;incrementar el contador de espera de cambio de color
btfss CONLIG,0X07 ;1000.0000 contador de espera para cambiar el color
return ; si no llegó todavia, entonces volver
clrf CONLIG ; si llegó, resetear contador de espera y procesar backlight
btfss SEGLOW,0 ; Agrego este toque pseudoramdom, depende como se encuentren los bits del SEGLOW, salto el color
incf BACLIG,1 ; este incremento es random <Para que la secuencia de color de fondo no sea siempre la misma>
btfss SEGLOW,1 ; Otro toque pseudoranmdom <se agrega un toque pseudorandom de acuerdo al estado de los bits de los>
incf BACLIG,1 ; este incremento es random <segundos en el momento de cambiar de codigo de color>
incf BACLIG,1 ;incrementar el registro de Back Light, ESTE se hace siempre
btfsc BACLIG,0X03 ; detectar 0000.1000 ó 0000.1XXX para que solo se manejen 3 bits
clrf BACLIG ;poner a cero si llego a 8 o se pasó a 9 0 A por el random
return
;-------------FIN DE BACK LIGHT ----------
;act_alm
;actualizar variables de almanaque antes de enviar las variable a los registros externos y encender los Leds
;Las variables que se usan y su asignación:
; Posiciones de bits; 7 6 5 4 3 2 1 0
;P0SDI3 Variable de LEDs de posición y tres dias: LON,GRA,MIN,LAT,LIBRE,LUN,MAR,MIE
;DI4ME4 Variable de LEDs de 4 dias y 4 meses: JUE,VIE,SAB,DOM, ENE,FEB,MAR,ABR
;MESES8 Variable de LEDs de 8 meses: MAY,JUN,JUL,AGO, SEP,OCT,NOV,DIC
;Uso las auxiliares COUNT0, COUNT1, COUNT3
;
;--------primero procesar mes -----------------------------------
;
clrf MESES8 ; acerar variables del almanaque
clrf DI4ME4 ;
clrf POSDI3 ;
;Recuperar el mes mostrado en el display, armar las variables de almanaque y mandarlas a los registros externos
swapf MESHIG,0 ;invertir los nibles, queda en W, el MESHIG no cambia (MESHIG son las decenas de Mes)
andlw 0xF0 ;limpiar los bits de < peso por las dudas
iorwf MESLOW,0 ; sumo ambos, el dato queda en W, el MESLOW no cambia
movwf COUNT0 ; salvar el mes en la auxiliar COUNT0, el mes expresado en BCD está ahi
;
;-------------------------------------------------------
movfw COUNT0 ; recuperar el mes en BCD
xorlw 0x12 ; ver si es 12 (diciembre)
btfss STATUS,Z
goto no_12
bsf MESES8,0 ; es 12 diciembre, encender el bit del led
movlw 0x03 ;el 01/12/21 es miercoles OJO , Código ACTUALIZADO AL 2021
movwf COUNT1 ; uso la auxiliar COUNT1 para guardar el indice del primer dia del mes
goto dia_alm ;
no_12 ; Indice que se guarda en COUNT1 es : 1-lun,2-mar,3-mie,4-jue,5-vie,6-sab,7-dom
movfw COUNT0 ;
xorlw 0x11
btfss STATUS,Z
goto no_11
bsf MESES8,1 ; es 11 (nov), encender el led
movlw 0x01 ;el 01/11/21 es lunes
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_11
movfw COUNT0 ;
xorlw 0x10
btfss STATUS,Z
goto no_10
bsf MESES8,2 ; es 10 octubre, encender el led
movlw 0x05 ;el 01/10/21 es viernes
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_10
movfw COUNT0 ;
xorlw 0x09
btfss STATUS,Z
goto no_09
bsf MESES8,3 ; es 09 septiembre, encender el led
movlw 0x03 ;el 01/09/21 es miercoles
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_09
movfw COUNT0 ;
xorlw 0x08
btfss STATUS,Z
goto no_08
bsf MESES8,4 ; es 08 agosto, encender el led
movlw 0x07 ;el 01/08/21 es domingo
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_08
movfw COUNT0 ;
xorlw 0x07
btfss STATUS,Z
goto no_07
bsf MESES8,5 ; es 07 julio, encender el led
movlw 0x04 ;el 01/07/21 es jueves
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_07
movfw COUNT0 ;
xorlw 0x06
btfss STATUS,Z
goto no_06
bsf MESES8,6 ; es 06 junio, encender el led
movlw 0x02 ;el 01/06/21 es martes
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_06
movfw COUNT0 ;
xorlw 0x05
btfss STATUS,Z
goto no_05
bsf MESES8,7 ; es 05 mayo , encender el led
movlw 0x06 ;el 01/12/21 es sabado
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_05
movfw COUNT0 ;
xorlw 0x04
btfss STATUS,Z
goto no_04
bsf DI4ME4,0 ; es 04 abril, encender el led
movlw 0x04 ;el 01/04/21 es jueves
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_04
movfw COUNT0 ;
xorlw 0x03
btfss STATUS,Z
goto no_03
bsf DI4ME4,1 ; es 03 marzo, encender el led
movlw 0x01 ;el 01/03/21 es lunes
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_03
movfw COUNT0 ;
xorlw 0x02
btfss STATUS,Z
goto no_02
bsf DI4ME4,2 ; es 02 febrero, encender el led
movlw 0x01 ;el 01/02/21 es lunes
movwf COUNT1 ;inicializar COUNT1
goto dia_alm
no_02 ; entonces es 01
bsf DI4ME4,3 ; es 01 enero, encender el led
movlw 0x05 ;el 01/01/21 es viernes
movwf COUNT1 ;inicializar COUNT1
dia_alm
;
;--------aqui procesar dia de la semana -----------------------------------
;
;
.jpg")