


Hola amigos, favor mover el hilo a otro parte, si este subforo no fuera el correcto!
Mi objetivo es el reportar en este paso a paso mi proyecto de crear un modelo de mi sistema de control de escotas para mi modelo de un velero de ja categoría J.
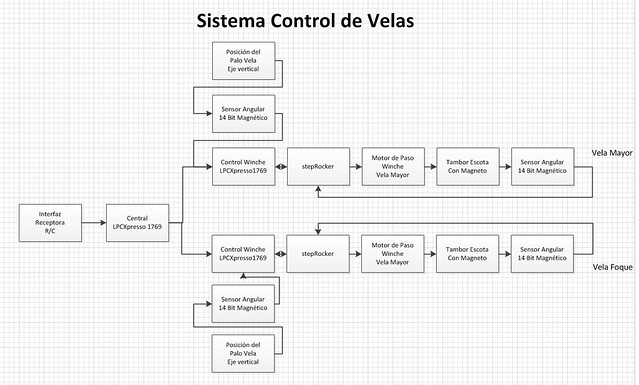
Este diagrama muestra el proyecto completo del sistema de control de escotas.
Quiero resaltar que han pasado 34 años desde que termine mi bachillerato alemán y 32 años desde que me dedique, sin mucho éxito confieso, a las matemáticas universitarias durante el estudio de ingeniería mecánica. De allí resulta que:
1. Tengo que refrescar y expander mis conocimientos de matemáticas.
Esto se me volvió evidente aprendiendo electrónica análoga y estudiando la información libremente disponible sobre Matlab, Simulink y la rica selección de "toolboxes" que existe. Como consecuencia me he decidido e iniciado el proceso de inscribirme en la Universidad técnica de Munich para un Bachelor de electrónica e informática. Solo existe la carrera en combinación de electrónica e informática, como explicación de la razón de seleccionar esta carrera. Afortunadamente aquí en Alemania el estudiar en una universidad pública, y estas son excelentes, es gratuito.
2. Tengo que aprender a usar Matlab, Simulink y las herramientas relacionadas (toolboxes).
Afortunadamente un conocido tiene una empresa en la que existe Matlab y este me va a permitir usar esa software en su empresa. Así aprender será posible. Además existe la posibilidad de poder usar la software durante 30 días de forma gratuita. Una vez que mis conocimientos hayan alcanzado un nivel adecuado usaré esa posibilidad. Una vez inscrito en la universidad, podré adquirir yo mismo esa software como estudiante.
Así pues ofresco que se me acompañe en esta odisea, agradezco por adelantado toda sugerencia, crítica y, si merecido, reconocimiento. Me puedo imaginar que podría tener algún interés. Mi forma de presentar el paso a paso sonará como si fuera un experto. Como lo he explicado no lo soy, por lo cual estoy consciente y pido considerarlo, que presento cosas totalmente nuevas para mi!
Como esencial considero aprovecharme del trabajo preliminar, de haber subdividido este proyecto en módulos con una funcionalidad que puede ser encapsulada. Esto significa que cada módulo tiene entradas definidas y crea como resultado unas salidas igualmente claras. El objetivo de esto era evitar que errores pudieran infectar otros módulos. Así pues el objetivo es empezar por uno de los módulos, empesar simplificando este en extremo, para luego ir madurando el modelo del módulo. Pero antes de volver un módulo mas sofisticado, pienso definir los módulos responsables en generar las entradas.
Habiendo visto que en las "toolboxes" para la modelación de sistemas físicos también existe un elemento para motores de paso, pienso empesar con el módulo: "Motor de paso, Winche, Vela Mayor".
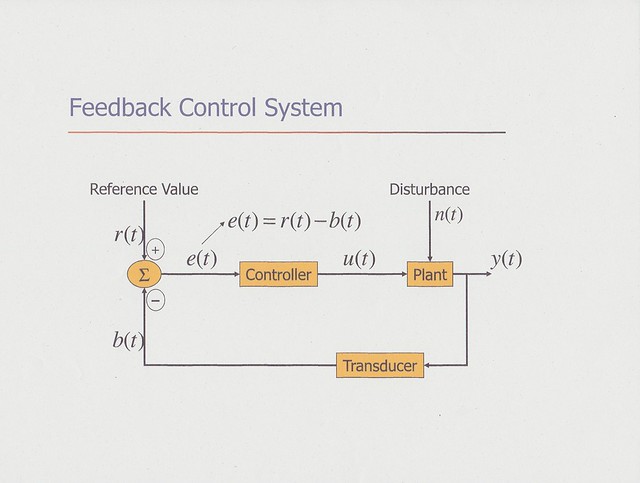
Este diagrama me gusta, porque permite reducir el concepto al mensaje básico de lo que es un sistema de control y sobre la división de labores/funcionalidad al crear el modelo del sistema que es mi objetivo aquí!
Básicamente son los 2 elementos esenciales:
El elemento de control y lo que se llama la "planta".
El controlador recibe información de todo tipo por sus entradas.
El controlador transforma o genera de las entradas sus salidas.
El controlador por lo tanto implementa una función que traduce lo que recibe en sus entradas para generar las salidas.
Las salidas del controlador son las entradas de la "planta" y estas controlan la funcionalidad proporcionada por la "planta.
Existen factores que repercuten en la función de la planta
y el resultado genera información que es proporcionado al controlador.
Esto habilita al controlador, existe entonces un circuito cerrado de control, adaptar el resultado de su función para lograr que la planta genere el resultado deseado.
Adaptemos estos conceptos muy genéricos al caso concreto del motor de paso que es el actor dentro del winche que controla la escota:
Como en Simulink, gracias a la toolbox "SimPowerSystems" existe el modelo de un motor de paso bipolar, adaptar este modelo para que represente el motor de paso "ST6018L3008-B" que pienso usar allí. Voy a usar la hoja de datos del motor para introducir en el modelo toda la información requerida.
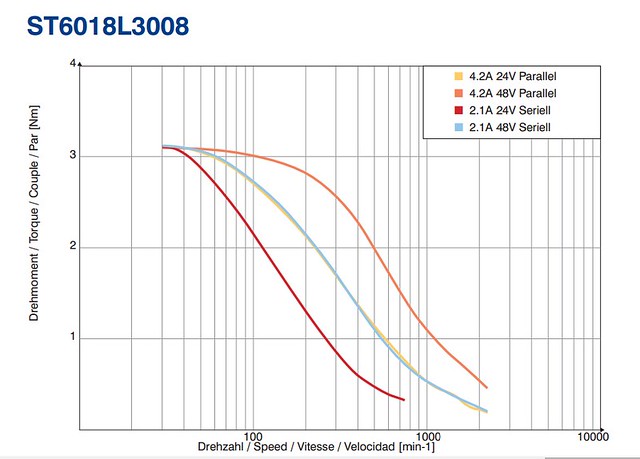
Aquí por ejemplo el diagrama que muestra la relación entre la velocidad de paso del motor y el torque. En mi modelo que usa 12 baterías LiFePO4 de 16 Ah capacidad conectadas en serie, podemos ver que el motor de paso va a ser operado entre las curva que corresponden a:
24 VDC, 4,2 A, conectado en paralelo y
48 VDC, 4,2 A, conectado en paralelo,
Ya vemos así una variabilidad de una de las entradas al "controlador sobre el tiempo.
Con las baterías recién cargadas, estas dan 3,3 VDC, de lo que resulta:
12 * 3,3 = 39,6 VDC
Con las baterías vacías, estas dan 2,0 VDC, de lo que resulta:
12 * 2,0 = 24,0 VDC
La tensión suministrada al motor de paso por lo tanto depende y varía sobre el tiempo dependiendo de la energía que ha suministrado.
Mirando las curvas correspondiente vemos, que la curva correspondiente a los 48 VDC es la de color anaranjado y la curva correspondiente a los 24 VDC es la curva que prácticamente es idéntica a la azul!
Si comparamos las 2 curvas y tomamos en consideración sus recorridos en el diagrama podremos generar una función que aproximará la relación entre torque disponible y la velocidad, pero tomando en consideración las tensiones disponibles que llegan del pack de baterías.
Pero existe otro parámetro que influye esta información y cuyas implicaciones aún tengo que estudiar. La placa que controla el motor de paso con su controlador ARM Cortex M0 y la software, llamada firmware, en combinación con la funcionalidad de las componentes influye y varía el flujo de corriente. Simplificando se puede decir, que la placa de control solo mandará esa cantidad de corriente al motor de paso, para generar el torque, algo mayor al requerido en todo momento.
De allí resulta que el valor de aplicar en el controlador para la corriente va a variar dependiendo de la "carga" del motor de paso. Esta carga varía con el tiempo reflejando la solicitación del motor de paso que define el torque requerido. Claro que las técnicas usadas por las componentes en la placa de control también definen el comportamiento de la variabilidad de la corriente suministrada.
De allí resulta que en el concierto de parámetros también entra a tener que ser considerado que situaciones quiero analizar. Me explico:
Si lo que quiero investigar es el consumo de energía del motor de paso y como resultado cuanto tiempo va a demorar hasta que tenga que recargar las baterías, tendré que decidir para que perfil de solicitación quiero hacer las simulaciones. O dicho de forma mas genérica: Que comportamiento de los diferentes parámetros quiero aplicar para lograr una información específica. De allí resulta que tengo que estudiar que objetivos quiero como resultado de las simulaciones y que comportamiento de los parámetros requiero.
Allí Matlab tiene otra herramienta, "toolbox" muy util y es la llamada "Simscape". Según entiendo me sirve para programar / especificar el comportamiento de las entradas al "controlador" y que cumplirá la función que requiero para generar el perfil de comportamiento de la entrada de corriente y tensión por ejemplo al motor de paso.
Probablemente será util contactar la empresa nanotec para preguntar si tienen modelos para las simulaciones en Simulink.
Pero también, quizá alguno de Ustedes sabe que tipo de estudios, simulaciones se hacen bajo estas circunstancias. Otro método será el investigar en el Internet si existe información sobre tales simulaciones y cuales objetivos se tienen allí.
Resulta que para mi aplicación en el contexto de la energía consumida en el motor de paso es de importancia saber si las baterías me van a durar el tiempo requerido.
Si el torque posible, disponible, también cuando las baterías llegan a descargarse al extremo de los 24 VDC aún alcanza para resistir una ráfaga de viento fuerte.
Si es justificable el considerable gasto adicional para frenos eléctricos es necesario.
Adaptar el proceso de control de la escota en relación a movimientos del palo de la vela mayor para lograr el libre movimiento del palo de la vela mayor, el mantener la escota lo mas corto posible y la frecuencia con la cual el motor de paso tiene que girar el tambor de la escota. Este último aspecto influye en el consumo de energía probablemente de forma sustanciosa, se conoce cuando servos estan constantemente moviéndose. Pero también influye en el circuito de control relacionado al sensor angular para el palo de la vela mayor y de la especificación de los valores para los umbrales, que controlan cuando el motor de paso gira el tambor para adaptar la longitud de la escota.
Este factor desafortunadamente no entra en efecto, ni en el módula del motor de paso, ni de la placa de control de este, sino en el decodificador de cuadratura de la placa LPCXpresso. esta es la responsable de mandar los comandos a la placa de control del motor de paso para que este se actuado.
De allí resulta que esta dependencia da un bloque que tiene influencia sobre una de las entradas y por lo tanto será elemento del "controlador".
De allí resulta otro objetivo en mi aprendizaje de matlab y sus toolboxes. Es el de programar módulos propios que entonces se vuelven reusables. Claro que tendré que investigar que es lo que ya existe de forma gratuita. Creo que también siendo estudiante aquí en Munich me dará acceso a la asesoría de personal universitario y de otros estudiantes.
Bueno, fin por hoy. Pero esta contribución tendrá como resultado el empezar a escribir la lista de condiciones.
Mi objetivo es el reportar en este paso a paso mi proyecto de crear un modelo de mi sistema de control de escotas para mi modelo de un velero de ja categoría J.
Este diagrama muestra el proyecto completo del sistema de control de escotas.
Quiero resaltar que han pasado 34 años desde que termine mi bachillerato alemán y 32 años desde que me dedique, sin mucho éxito confieso, a las matemáticas universitarias durante el estudio de ingeniería mecánica. De allí resulta que:
1. Tengo que refrescar y expander mis conocimientos de matemáticas.
Esto se me volvió evidente aprendiendo electrónica análoga y estudiando la información libremente disponible sobre Matlab, Simulink y la rica selección de "toolboxes" que existe. Como consecuencia me he decidido e iniciado el proceso de inscribirme en la Universidad técnica de Munich para un Bachelor de electrónica e informática. Solo existe la carrera en combinación de electrónica e informática, como explicación de la razón de seleccionar esta carrera. Afortunadamente aquí en Alemania el estudiar en una universidad pública, y estas son excelentes, es gratuito.
2. Tengo que aprender a usar Matlab, Simulink y las herramientas relacionadas (toolboxes).
Afortunadamente un conocido tiene una empresa en la que existe Matlab y este me va a permitir usar esa software en su empresa. Así aprender será posible. Además existe la posibilidad de poder usar la software durante 30 días de forma gratuita. Una vez que mis conocimientos hayan alcanzado un nivel adecuado usaré esa posibilidad. Una vez inscrito en la universidad, podré adquirir yo mismo esa software como estudiante.
Así pues ofresco que se me acompañe en esta odisea, agradezco por adelantado toda sugerencia, crítica y, si merecido, reconocimiento. Me puedo imaginar que podría tener algún interés. Mi forma de presentar el paso a paso sonará como si fuera un experto. Como lo he explicado no lo soy, por lo cual estoy consciente y pido considerarlo, que presento cosas totalmente nuevas para mi!
Como esencial considero aprovecharme del trabajo preliminar, de haber subdividido este proyecto en módulos con una funcionalidad que puede ser encapsulada. Esto significa que cada módulo tiene entradas definidas y crea como resultado unas salidas igualmente claras. El objetivo de esto era evitar que errores pudieran infectar otros módulos. Así pues el objetivo es empezar por uno de los módulos, empesar simplificando este en extremo, para luego ir madurando el modelo del módulo. Pero antes de volver un módulo mas sofisticado, pienso definir los módulos responsables en generar las entradas.
Habiendo visto que en las "toolboxes" para la modelación de sistemas físicos también existe un elemento para motores de paso, pienso empesar con el módulo: "Motor de paso, Winche, Vela Mayor".
Este diagrama me gusta, porque permite reducir el concepto al mensaje básico de lo que es un sistema de control y sobre la división de labores/funcionalidad al crear el modelo del sistema que es mi objetivo aquí!
Básicamente son los 2 elementos esenciales:
El elemento de control y lo que se llama la "planta".
El controlador recibe información de todo tipo por sus entradas.
El controlador transforma o genera de las entradas sus salidas.
El controlador por lo tanto implementa una función que traduce lo que recibe en sus entradas para generar las salidas.
Las salidas del controlador son las entradas de la "planta" y estas controlan la funcionalidad proporcionada por la "planta.
Existen factores que repercuten en la función de la planta
y el resultado genera información que es proporcionado al controlador.
Esto habilita al controlador, existe entonces un circuito cerrado de control, adaptar el resultado de su función para lograr que la planta genere el resultado deseado.
Adaptemos estos conceptos muy genéricos al caso concreto del motor de paso que es el actor dentro del winche que controla la escota:
Como en Simulink, gracias a la toolbox "SimPowerSystems" existe el modelo de un motor de paso bipolar, adaptar este modelo para que represente el motor de paso "ST6018L3008-B" que pienso usar allí. Voy a usar la hoja de datos del motor para introducir en el modelo toda la información requerida.
Aquí por ejemplo el diagrama que muestra la relación entre la velocidad de paso del motor y el torque. En mi modelo que usa 12 baterías LiFePO4 de 16 Ah capacidad conectadas en serie, podemos ver que el motor de paso va a ser operado entre las curva que corresponden a:
24 VDC, 4,2 A, conectado en paralelo y
48 VDC, 4,2 A, conectado en paralelo,
Ya vemos así una variabilidad de una de las entradas al "controlador sobre el tiempo.
Con las baterías recién cargadas, estas dan 3,3 VDC, de lo que resulta:
12 * 3,3 = 39,6 VDC
Con las baterías vacías, estas dan 2,0 VDC, de lo que resulta:
12 * 2,0 = 24,0 VDC
La tensión suministrada al motor de paso por lo tanto depende y varía sobre el tiempo dependiendo de la energía que ha suministrado.
Mirando las curvas correspondiente vemos, que la curva correspondiente a los 48 VDC es la de color anaranjado y la curva correspondiente a los 24 VDC es la curva que prácticamente es idéntica a la azul!
Si comparamos las 2 curvas y tomamos en consideración sus recorridos en el diagrama podremos generar una función que aproximará la relación entre torque disponible y la velocidad, pero tomando en consideración las tensiones disponibles que llegan del pack de baterías.
Pero existe otro parámetro que influye esta información y cuyas implicaciones aún tengo que estudiar. La placa que controla el motor de paso con su controlador ARM Cortex M0 y la software, llamada firmware, en combinación con la funcionalidad de las componentes influye y varía el flujo de corriente. Simplificando se puede decir, que la placa de control solo mandará esa cantidad de corriente al motor de paso, para generar el torque, algo mayor al requerido en todo momento.
De allí resulta que el valor de aplicar en el controlador para la corriente va a variar dependiendo de la "carga" del motor de paso. Esta carga varía con el tiempo reflejando la solicitación del motor de paso que define el torque requerido. Claro que las técnicas usadas por las componentes en la placa de control también definen el comportamiento de la variabilidad de la corriente suministrada.
De allí resulta que en el concierto de parámetros también entra a tener que ser considerado que situaciones quiero analizar. Me explico:
Si lo que quiero investigar es el consumo de energía del motor de paso y como resultado cuanto tiempo va a demorar hasta que tenga que recargar las baterías, tendré que decidir para que perfil de solicitación quiero hacer las simulaciones. O dicho de forma mas genérica: Que comportamiento de los diferentes parámetros quiero aplicar para lograr una información específica. De allí resulta que tengo que estudiar que objetivos quiero como resultado de las simulaciones y que comportamiento de los parámetros requiero.
Allí Matlab tiene otra herramienta, "toolbox" muy util y es la llamada "Simscape". Según entiendo me sirve para programar / especificar el comportamiento de las entradas al "controlador" y que cumplirá la función que requiero para generar el perfil de comportamiento de la entrada de corriente y tensión por ejemplo al motor de paso.
Probablemente será util contactar la empresa nanotec para preguntar si tienen modelos para las simulaciones en Simulink.
Pero también, quizá alguno de Ustedes sabe que tipo de estudios, simulaciones se hacen bajo estas circunstancias. Otro método será el investigar en el Internet si existe información sobre tales simulaciones y cuales objetivos se tienen allí.
Resulta que para mi aplicación en el contexto de la energía consumida en el motor de paso es de importancia saber si las baterías me van a durar el tiempo requerido.
Si el torque posible, disponible, también cuando las baterías llegan a descargarse al extremo de los 24 VDC aún alcanza para resistir una ráfaga de viento fuerte.
Si es justificable el considerable gasto adicional para frenos eléctricos es necesario.
Adaptar el proceso de control de la escota en relación a movimientos del palo de la vela mayor para lograr el libre movimiento del palo de la vela mayor, el mantener la escota lo mas corto posible y la frecuencia con la cual el motor de paso tiene que girar el tambor de la escota. Este último aspecto influye en el consumo de energía probablemente de forma sustanciosa, se conoce cuando servos estan constantemente moviéndose. Pero también influye en el circuito de control relacionado al sensor angular para el palo de la vela mayor y de la especificación de los valores para los umbrales, que controlan cuando el motor de paso gira el tambor para adaptar la longitud de la escota.
Este factor desafortunadamente no entra en efecto, ni en el módula del motor de paso, ni de la placa de control de este, sino en el decodificador de cuadratura de la placa LPCXpresso. esta es la responsable de mandar los comandos a la placa de control del motor de paso para que este se actuado.
De allí resulta que esta dependencia da un bloque que tiene influencia sobre una de las entradas y por lo tanto será elemento del "controlador".
De allí resulta otro objetivo en mi aprendizaje de matlab y sus toolboxes. Es el de programar módulos propios que entonces se vuelven reusables. Claro que tendré que investigar que es lo que ya existe de forma gratuita. Creo que también siendo estudiante aquí en Munich me dará acceso a la asesoría de personal universitario y de otros estudiantes.
Bueno, fin por hoy. Pero esta contribución tendrá como resultado el empezar a escribir la lista de condiciones.

")

