Hace años que vengo leyendo el foro, pero he preguntado muy pocas veces.
Ante todo, me dedico a la electrónica como hobby (entre otros que tengo). Tengo nociones pero hay cosas que no las domino.
La cuestión es la siguiente. Se me ocurrió automatizar un pequeño torno de banco que tengo. Invertí en motores NEMA 17, los drivers correspondientes (creo que el modelo es DM422 o algo así) y con paciencia, ayuda de instrumental y una placa arduino logré leer la salida de datos de los calibres digitales chinos. De manera que el torno lo puedo posicionar de dos maneras: ya sea enviando X cantidad de pulsos al correspondiente PAP hasta posicionar el carro o el charriot del torno donde quiero, o bien haciendo girrar los motores continuamente hasta que la lectura del calibre indique la distancia deseada y la placa arduino detenga el envío de pulsos. Realmente todo funciona bastante bien. Al punto que un amigo lo vio funcionando y quedó maravillado y quiere hacer los mismo pero en un torno de 2 metros de bancada. Para mover semejante torno tendremos que recurrir a motores más grandes y por ende a manejar corrientes más altas. Si bien debe haber drivers que tienen la capacidad de manejar corrientes de digamos 3 o más amper, la idea fue fabricar un driver propio. Aclaro, los PAP que se utilizarán serán bipolares.
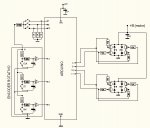
La primera idea para el driver fue un L297 y dos puente H con TIP102 (porque los tenía a mano), pero me encontré con la limitación que el L297 solo ofrece paso completo, medio paso y wave stepping. Queriendo imitar al DM422 decidí reemplazar el L297 por una placa arduino (que también tenía a mano) y trazando diagramas fasoriales armé unas tablas de vectores para usar las salidas PWM del arduino. Debido la limitación de memo ria de la placa arduino nano (que fue la que usé) los micropasos que puedo manejar son, paso completo, medio paso, 4 8, 16 y hasta 32 micropasos, pero disponiendo de más memoria no hay problema en llegar a manejar más cantidad de micropasos.
El driver ya está funcionando con el arduino y los 2 puente H.
Ahora me gustaría incorporarle un limitador de corriente (creo que así se denominan) para poder elevar la tensión de alimentación sin dañar al PAP. Googleando encontré que lo mejor es usar un flip flop, con un oscilador y un operacional, y en base a una tensión de referencia en el opracional lograr manejar la corriente.
Alguien me puede orientar donde leer como funciona esto?, porque realmente desconozco el tema por completo.
Desde ya muchas gracias, y si alguien necesita el código para el arduino con gusto lo haré llegar.
Cordial saludo.
pd: me dice que el mensaje es mu corto y que agregue palabras...xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx ...
Ante todo, me dedico a la electrónica como hobby (entre otros que tengo). Tengo nociones pero hay cosas que no las domino.
La cuestión es la siguiente. Se me ocurrió automatizar un pequeño torno de banco que tengo. Invertí en motores NEMA 17, los drivers correspondientes (creo que el modelo es DM422 o algo así) y con paciencia, ayuda de instrumental y una placa arduino logré leer la salida de datos de los calibres digitales chinos. De manera que el torno lo puedo posicionar de dos maneras: ya sea enviando X cantidad de pulsos al correspondiente PAP hasta posicionar el carro o el charriot del torno donde quiero, o bien haciendo girrar los motores continuamente hasta que la lectura del calibre indique la distancia deseada y la placa arduino detenga el envío de pulsos. Realmente todo funciona bastante bien. Al punto que un amigo lo vio funcionando y quedó maravillado y quiere hacer los mismo pero en un torno de 2 metros de bancada. Para mover semejante torno tendremos que recurrir a motores más grandes y por ende a manejar corrientes más altas. Si bien debe haber drivers que tienen la capacidad de manejar corrientes de digamos 3 o más amper, la idea fue fabricar un driver propio. Aclaro, los PAP que se utilizarán serán bipolares.
La primera idea para el driver fue un L297 y dos puente H con TIP102 (porque los tenía a mano), pero me encontré con la limitación que el L297 solo ofrece paso completo, medio paso y wave stepping. Queriendo imitar al DM422 decidí reemplazar el L297 por una placa arduino (que también tenía a mano) y trazando diagramas fasoriales armé unas tablas de vectores para usar las salidas PWM del arduino. Debido la limitación de memo ria de la placa arduino nano (que fue la que usé) los micropasos que puedo manejar son, paso completo, medio paso, 4 8, 16 y hasta 32 micropasos, pero disponiendo de más memoria no hay problema en llegar a manejar más cantidad de micropasos.
El driver ya está funcionando con el arduino y los 2 puente H.
Ahora me gustaría incorporarle un limitador de corriente (creo que así se denominan) para poder elevar la tensión de alimentación sin dañar al PAP. Googleando encontré que lo mejor es usar un flip flop, con un oscilador y un operacional, y en base a una tensión de referencia en el opracional lograr manejar la corriente.
Alguien me puede orientar donde leer como funciona esto?, porque realmente desconozco el tema por completo.
Desde ya muchas gracias, y si alguien necesita el código para el arduino con gusto lo haré llegar.
Cordial saludo.
pd: me dice que el mensaje es mu corto y que agregue palabras...xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx ...