Buena Noche a todos, en esta ocasión les comparto el trabajo recién realizado como prueba "piloto" para la generación de una "flotilla" de vehículos a radio control.
El presente desarrollo se denomina “Tanque de Guerra Radio Controlado”, y está elaborado para formar parte de un evento de exhibición y promoción de la Robótica, principalmente orientado a niños de 6 a 13 años.
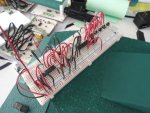
El equipo esta elaborado a partir de materiales poco resistentes, entre los cuales se destacan el Unicel, la Cartulina y el Cartón. Los elementos de carrocería están unidos mediante simple contacto directo con pegamento blanco extra fuerte.
Las “orugas” (son simuladas), están elaboradas de abate lenguas sobre cartulina, y a su vez, van montadas sobre “ruedas” hechas de postes de Unicel –por supuesto que ninguno de estos elementos es móvil-.
La base que soporta los componentes electrónicos y de transmisión de potencia esta hecha a base de placa de plástico de 3mm de espesor.
Tiene dos motorreductores eléctricos de 120 RPM y 60 mili Amperes de consumo. Estos motorreductores van acoplados a ruedas de plástico con goma antiderrapante para una mejor tracción. Para su control se utiliza un circuito integrado Puente “H” L293D, mismo que opera a 9VCD para los motores y recibe señales de 5VCD desde un Micro controlador.
El diseño motriz del equipo es en forma de “triciclo”, por lo que en la parte posterior cuenta con una rueda loca de plástico de 2” de diámetro.
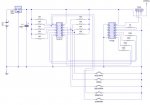
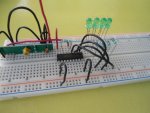
Para controlar los movimientos del Tanque se utiliza un Micro controlador PIC 16F6278A, el cual se encarga de activar los sentidos de giro de los dos motorreductores, también controla el accionamiento del Arma Principal y tiene un sensor de vibración que le envía las señales para indicar si ha sido golpeado por otro Robot; tiene también un indicador luminoso de Led´s, los cuáles encienden a medida que el equipo es golpeado por su contrincante y al llegar a los 10 golpes registrados encenderán todos los Led’s y el equipo quedará inmovilizado, por lo que quedaría eliminado de la competencia.
Para comunicarnos con el PIC, utilizamos RF con módulos TWS y RWS (transmisor y receptor de xxxx Mhz.), y se utilizan los circuitos integrados HT12-E y HT12-D para codificar y decodificar los valores que establecen los movimientos del vehículo.
Dentro del Tanque entonces solo tenemos tres tarjetas: un módulo receptor de RF y decodificador, un módulo controlador por medio de PIC y un módulo de potencia basado en L293D.
Como fuente de alimentación se utilizan dos pilas “cuadradas” de 9VCD, una para la etapa de control y otra para la etapa de fuerza.
Como Arma Principal se utiliza un Disparador de dardos de la marca comercial NERF, concretamente el Dart Tag Nerf, el cual es un cilindro rotativo de hasta 10 disparos controlado por medio del Microcontrolador PIC.
Es importante señalar que se ha dejado fija el Arma principal, de tal forma que el operario debe de tener la destreza suficiente para mover el vehículo y colocarlo “a tiro” para abatir al adversario, además, se ha realizado el control de tal forma que no se puede desplazar y disparar al mismo tiempo, lo cual fuerza al operador a mejorar su habilidad de reacción y por ende, a generar una estrategia que le ayude a obtener el triunfo. Para este caso, los demás vehículos –aún en elaboración- operan de la misma forma, pero con Armas Principales distintas.
Otra característica importante en el control, es que el equipo lo operan dos personas, ya que uno conduce y otro es el Artillero, por lo que además de los puntos descritos arriba, se hace necesaria una comunicación y trabajo en equipo constante para lograr abatir al contrincante.
Debido al material del que está elaborado el vehículo, la DESTRUCCIÓN del mismo esta Garantizada, de tal forma que los espectadores NO sufran ningún daño por piezas filosas o pesadas que pudieran lesionarlos, y en cambio podrán disfrutar de la sensación de observar los daños causados entre uno y otro oponente con toda seguridad.
La electrónica de control y fuerza no sufrirá ningún daño debido a su ubicación, por lo que siempre se deberá de restituir la carrocería y se podría incluso cambiar la forma de la misma durante cada encuentro. Hay que mencionar que esta acción es rápida y sencilla por los materiales utilizados.
El control remoto opera con un modulo RF TWS, un codificador HT12-E y un Micro controlador PIC 16F628A para trabajar con mayor cantidad de canales, pudiendo ser hasta 15 diferentes.
Para su alimentación se requiere de una pila “cuadrada” de 9VCD. En este caso solo ocupamos 5 señales digitales de la siguiente manera:
1= Adelante
2= Atrás
3= Izquierda
4= Derecha
5= Disparo Arma Principal
También se puede controlar desde la PC, simplemente añadiendo un módulo para RS232 del lado del control remoto, pudiendo incluir también una cámara de video en el equipo, lo cual de momento no es necesario dada la finalidad particular de este equipo.
Les dejo el video de prueba y las fotografías del equipo. El PCB aún no se elabora, ya que como pueden ver, se utilizaron placas perforadas con la finalidad de realizar un montaje rapido y determinar los elementos totales a utilizar asi como su ubicación, a partir de aqui ya se elabora la placa PCB para los demás equipos.
Espero que sea de su agrado,
Saludos!!!
El presente desarrollo se denomina “Tanque de Guerra Radio Controlado”, y está elaborado para formar parte de un evento de exhibición y promoción de la Robótica, principalmente orientado a niños de 6 a 13 años.
El equipo esta elaborado a partir de materiales poco resistentes, entre los cuales se destacan el Unicel, la Cartulina y el Cartón. Los elementos de carrocería están unidos mediante simple contacto directo con pegamento blanco extra fuerte.
Las “orugas” (son simuladas), están elaboradas de abate lenguas sobre cartulina, y a su vez, van montadas sobre “ruedas” hechas de postes de Unicel –por supuesto que ninguno de estos elementos es móvil-.
La base que soporta los componentes electrónicos y de transmisión de potencia esta hecha a base de placa de plástico de 3mm de espesor.
Tiene dos motorreductores eléctricos de 120 RPM y 60 mili Amperes de consumo. Estos motorreductores van acoplados a ruedas de plástico con goma antiderrapante para una mejor tracción. Para su control se utiliza un circuito integrado Puente “H” L293D, mismo que opera a 9VCD para los motores y recibe señales de 5VCD desde un Micro controlador.
El diseño motriz del equipo es en forma de “triciclo”, por lo que en la parte posterior cuenta con una rueda loca de plástico de 2” de diámetro.
Para controlar los movimientos del Tanque se utiliza un Micro controlador PIC 16F6278A, el cual se encarga de activar los sentidos de giro de los dos motorreductores, también controla el accionamiento del Arma Principal y tiene un sensor de vibración que le envía las señales para indicar si ha sido golpeado por otro Robot; tiene también un indicador luminoso de Led´s, los cuáles encienden a medida que el equipo es golpeado por su contrincante y al llegar a los 10 golpes registrados encenderán todos los Led’s y el equipo quedará inmovilizado, por lo que quedaría eliminado de la competencia.
Para comunicarnos con el PIC, utilizamos RF con módulos TWS y RWS (transmisor y receptor de xxxx Mhz.), y se utilizan los circuitos integrados HT12-E y HT12-D para codificar y decodificar los valores que establecen los movimientos del vehículo.
Dentro del Tanque entonces solo tenemos tres tarjetas: un módulo receptor de RF y decodificador, un módulo controlador por medio de PIC y un módulo de potencia basado en L293D.
Como fuente de alimentación se utilizan dos pilas “cuadradas” de 9VCD, una para la etapa de control y otra para la etapa de fuerza.
Como Arma Principal se utiliza un Disparador de dardos de la marca comercial NERF, concretamente el Dart Tag Nerf, el cual es un cilindro rotativo de hasta 10 disparos controlado por medio del Microcontrolador PIC.
Es importante señalar que se ha dejado fija el Arma principal, de tal forma que el operario debe de tener la destreza suficiente para mover el vehículo y colocarlo “a tiro” para abatir al adversario, además, se ha realizado el control de tal forma que no se puede desplazar y disparar al mismo tiempo, lo cual fuerza al operador a mejorar su habilidad de reacción y por ende, a generar una estrategia que le ayude a obtener el triunfo. Para este caso, los demás vehículos –aún en elaboración- operan de la misma forma, pero con Armas Principales distintas.
Otra característica importante en el control, es que el equipo lo operan dos personas, ya que uno conduce y otro es el Artillero, por lo que además de los puntos descritos arriba, se hace necesaria una comunicación y trabajo en equipo constante para lograr abatir al contrincante.
Debido al material del que está elaborado el vehículo, la DESTRUCCIÓN del mismo esta Garantizada, de tal forma que los espectadores NO sufran ningún daño por piezas filosas o pesadas que pudieran lesionarlos, y en cambio podrán disfrutar de la sensación de observar los daños causados entre uno y otro oponente con toda seguridad.
La electrónica de control y fuerza no sufrirá ningún daño debido a su ubicación, por lo que siempre se deberá de restituir la carrocería y se podría incluso cambiar la forma de la misma durante cada encuentro. Hay que mencionar que esta acción es rápida y sencilla por los materiales utilizados.
El control remoto opera con un modulo RF TWS, un codificador HT12-E y un Micro controlador PIC 16F628A para trabajar con mayor cantidad de canales, pudiendo ser hasta 15 diferentes.
Para su alimentación se requiere de una pila “cuadrada” de 9VCD. En este caso solo ocupamos 5 señales digitales de la siguiente manera:
1= Adelante
2= Atrás
3= Izquierda
4= Derecha
5= Disparo Arma Principal
También se puede controlar desde la PC, simplemente añadiendo un módulo para RS232 del lado del control remoto, pudiendo incluir también una cámara de video en el equipo, lo cual de momento no es necesario dada la finalidad particular de este equipo.
Les dejo el video de prueba y las fotografías del equipo. El PCB aún no se elabora, ya que como pueden ver, se utilizaron placas perforadas con la finalidad de realizar un montaje rapido y determinar los elementos totales a utilizar asi como su ubicación, a partir de aqui ya se elabora la placa PCB para los demás equipos.
Espero que sea de su agrado,
Saludos!!!
Adjuntos
-
 DSC01938.JPG122.2 KB · Visitas: 48
DSC01938.JPG122.2 KB · Visitas: 48 -
 DSC01939.JPG126.8 KB · Visitas: 40
DSC01939.JPG126.8 KB · Visitas: 40 -
 DSC01940.JPG127.1 KB · Visitas: 43
DSC01940.JPG127.1 KB · Visitas: 43 -
 DSC01941.JPG123.9 KB · Visitas: 34
DSC01941.JPG123.9 KB · Visitas: 34 -
 DSC01942.JPG132.3 KB · Visitas: 27
DSC01942.JPG132.3 KB · Visitas: 27 -
 DSC01943.JPG131.3 KB · Visitas: 27
DSC01943.JPG131.3 KB · Visitas: 27 -
 DSC01944.JPG131.2 KB · Visitas: 21
DSC01944.JPG131.2 KB · Visitas: 21 -
 DSC01945.JPG135.3 KB · Visitas: 23
DSC01945.JPG135.3 KB · Visitas: 23 -
 DSC01946.JPG128.6 KB · Visitas: 16
DSC01946.JPG128.6 KB · Visitas: 16 -
 DSC01947.JPG130.8 KB · Visitas: 14
DSC01947.JPG130.8 KB · Visitas: 14 -
 DSC01948.JPG127.3 KB · Visitas: 14
DSC01948.JPG127.3 KB · Visitas: 14 -
 DSC01949.JPG131.9 KB · Visitas: 15
DSC01949.JPG131.9 KB · Visitas: 15 -
 DSC01950.JPG132.1 KB · Visitas: 12
DSC01950.JPG132.1 KB · Visitas: 12 -
 DSC01951.JPG132.1 KB · Visitas: 12
DSC01951.JPG132.1 KB · Visitas: 12 -
 DSC01952.JPG127.3 KB · Visitas: 14
DSC01952.JPG127.3 KB · Visitas: 14 -
 DSC01953.JPG135.8 KB · Visitas: 13
DSC01953.JPG135.8 KB · Visitas: 13 -
 DSC01954.JPG131.7 KB · Visitas: 13
DSC01954.JPG131.7 KB · Visitas: 13 -
 DSC01955.JPG134.2 KB · Visitas: 13
DSC01955.JPG134.2 KB · Visitas: 13 -
 DSC01956.JPG137.5 KB · Visitas: 15
DSC01956.JPG137.5 KB · Visitas: 15 -
 DSC01957.JPG120.4 KB · Visitas: 12
DSC01957.JPG120.4 KB · Visitas: 12 -
 DSC01966.JPG124.5 KB · Visitas: 22
DSC01966.JPG124.5 KB · Visitas: 22 -
 DSC01967.JPG118.7 KB · Visitas: 22
DSC01967.JPG118.7 KB · Visitas: 22 -
 DSC01968.JPG121.9 KB · Visitas: 23
DSC01968.JPG121.9 KB · Visitas: 23 -
 DSC01969.JPG129.7 KB · Visitas: 29
DSC01969.JPG129.7 KB · Visitas: 29 -
 DSC01970.JPG132.5 KB · Visitas: 24
DSC01970.JPG132.5 KB · Visitas: 24
")